
Ինչու տաք բարձր պտույտների վրա
Պարունակություն
Ավտոմոբիլային շարժիչի պարապ ռեժիմը (XX), որի արագացուցիչն արձակված է և փոխանցման տուփը չեզոք դիրքում է բոլոր շարժիչների վրա, բացառությամբ ամենահինների, կարգավորվում է առանձին սարքերով և պետք է կայուն լինի: Հատկապես լիովին տաքացված շարժիչով, երբ ստեղծված են բոլոր պայմանները վառելիքի խառնուրդի ճիշտ չափաբաժնի համար:

Քսաներորդում ծնկաձև լիսեռի պտտման արագությունը սահմանվում է կառուցողականորեն, դրա պահպանման ճշգրտությունը ցույց է տալիս նյութական մասի սպասարկման հնարավորությունը:
Ինչպես որոշել, որ անգործության արագությունը սկսեց լողալ
Պտտման արագության ցիկլային կամ քաոսային փոփոխությունները հստակ տեսանելի են տախոմետրի ասեղի արձագանքով կամ ականջի միջոցով: Ցանկացած նկատելի տատանումներ անընդունելի են։ Հին կարբյուրատորային շարժիչները կամ առանց էլեկտրոնային հսկողության դիզելային շարժիչները կարող են արագության թռիչքներ առաջացնել բեռները փոխելու ժամանակ:
Այստեղ բեռը պետք է դիտարկել ոչ միայն փոխանցման տուփի ներգրավումը: Շարժիչն ունի կցված ագրեգատներ, որոնց էներգիայի սպառումը հաստատուն չէ։ Դա կարող է լինել:
- էլեկտրիկ, որը փոխում է էներգիայի սպառումը գեներատորից՝ դրանով իսկ բեռնելով իր գոտի շարժիչը ծնկաձև լիսեռի ճախարակից.
- համանման փոփոխական բեռը հզոր ղեկի պոմպից, երբ այն պտտվում է.
- սեղմելով արգելակման ոտնակը՝ առաջացնելով արգելակման ուժեղացուցիչի գործարկում;
- միացնելով կլիմայական համակարգի օդորակման կոմպրեսորը.
- շարժիչի ջերմաստիճանի փոփոխություն.

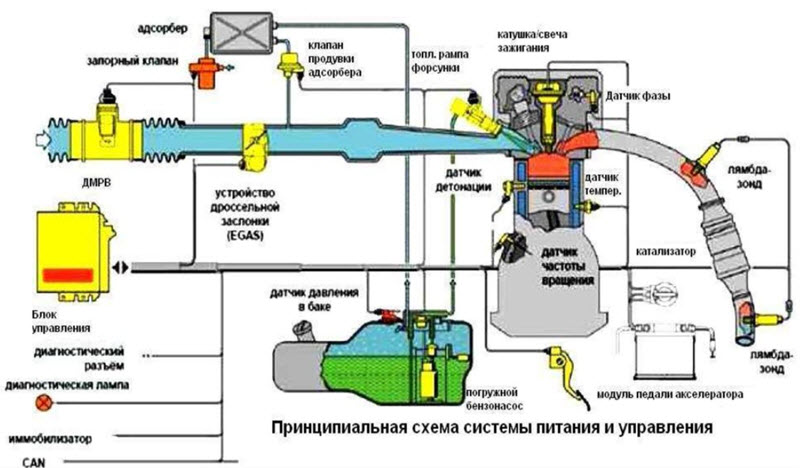
Ժամանակակից շարժիչներում հետադարձ կապ կա ծնկաձև լիսեռի դիրքի սենսորի միջոցով: Էլեկտրոնային կառավարման միավորը (ECU) նկատում է ծրագրում սահմանված արագության և իրական արագության տարբերությունը, որից հետո լրացուցիչ օդի, վառելիքի մատակարարումը կամ բռնկման ժամանակի փոփոխությունը հարթեցնում է իրավիճակը:
Բայց եթե համակարգում կան անսարքություններ, ապա կառավարման տիրույթը բավարար չէ, կամ վերահսկիչը ժամանակ չունի արագ փոփոխություններ մշակելու համար, շարժիչը փոխում է արագությունը, թրթռում և ցնցվում է:
Ի՞նչն է առաջացնում տաք շարժիչի վրա բարձր RPM-ներ:
Դուք կարող եք ընդհանրացնել բոլոր շարժիչների արագության բարձրացման պատճառները: Դրանք խառնուրդի բաղադրության փոփոխություններ են, բռնկման կամ մեխանիկական մասի հետ կապված խնդիրներ։
Սխալները պետք է նշվեն աշխատանքային հոսքի յուրաքանչյուր կազմակերպության համար, բենզինի պարզունակ ցողում կարբյուրատորում, վերահսկվող մատակարարում էլեկտրոնային ներարկման համակարգում կամ դիզելային շարժիչի վառելիքի հավաքույթներում:
Կարբյուրատոր ICE
Նման ներքին այրման շարժիչների տարբերակիչ առանձնահատկությունն արագության վերաբերյալ հետադարձ կապի բացակայությունն է: Կարբյուրատորը թողարկում է խառնուրդի որոշակի քանակություն՝ ելնելով դրա միջով անցնող օդի հոսքի արագությունից։
Այս արագությունը կախված է պտտման արագությունից, բայց չի կարելի ակնկալել ճշգրիտ արձագանք բոլոր գործոններին: Շարժիչը կարող է կորցնել արագությունը ցանկացած բեռից՝ սպառողների անսարքության կամ միացման տեսքով, և փոխհատուցում չի տրվում:

Հնարավոր է նաև հակառակ իրավիճակը, երբ պտույտները բարձր են, բայց կարբյուրատորի անգործության համակարգը կարող է արձագանքել միակ ձևով՝ ավելացնել ավելի շատ խառնուրդ՝ պահպանելով այս ավելացված պտույտները։ Հետեւաբար, գրեթե ամեն ինչ ազդում է ռոտացիայի արագության վրա:
Ամենից հաճախ ինքնավար XX համակարգի աշխատանքը խաթարվում է կարբյուրատորի խցանումների պատճառով: Կարգավորելու փորձերը հանգեցնում են անկայուն աշխատանքի և արտանետումների մեջ վնասակար նյութերի պարունակության կտրուկ աճի, իսկ շարժման ընթացքում շարժիչը կարող է կանգ առնել ամենաանպատեհ պահին: Բարեբախտաբար, կարբյուրացված շարժիչները գրեթե անհետացել են:
Ինժեկտոր
Նկատելով արագության աճ՝ ECM-ը հրահանգ կտա նվազեցնել դրանք։ Օդային ալիքը ծածկվելու է սովորական կարգավորիչով, սակայն դրա հնարավորությունները սահմանափակ են։
Տիպիկ իրավիճակ է հսկիչ ալիքը շրջանցող ավելցուկային օդի հոսքը: Համակարգը կավելացնի համապատասխան քանակությամբ բենզին, արագությունը կավելանա։ Անհնար է ուղղել սխալը, XX ալիքն արդեն ամբողջովին փակ է:
Սխալի ազդանշան կհայտնվի, վերահսկիչը կգնա արտակարգ ռեժիմի ՝ պահպանելով ավելացված արագությունը, քանի որ անվտանգ չէ շարժիչը կանգնեցնելը:
Դիզելային շարժիչ
Դիզելները նույնպես տարբեր են՝ սկսած մեխանիկական պոմպերով վառելիքի ամենապարզ համակարգերից մինչև ժամանակակիցները, որոնք էլեկտրոնային եղանակով վերահսկվում են բազմաթիվ սենսորների ազդանշաններով, բայց ամեն ինչի հիմքը ECU-ով չափվող օդի հոսքն է:
Խախտումների ընդհանուր պատճառ է հանդիսանում վերաշրջանառության փականը, որը նախատեսված է արտանետումների մի մասը վերադարձնելու համար: Այն պայմանները, որոնցում այն գործում է, նպաստում են աղտոտմանը և ձախողմանը:
Հնարավոր են նաև այլ մեղավորներ՝ բարձր ճնշման պոմպ, սենսորներ, կարգավորիչներ, ընդունող կոլեկտոր, ներարկիչներ։ Անհրաժեշտ է համալիր ախտորոշում.
Խնդրի լուծման ուղիները
Խախտումը վերացնելը սովորաբար դժվար չէ, դրա որոնման վրա ավելի շատ ժամանակ է ծախսվում՝ տարբեր պատճառներով։

Massանգվածային օդի հոսքի սենսոր
DMRV-ն կարող է աղավաղված ընթերցումներ տալ՝ սխալ մտցնելով համակարգչի հաշվարկների մեջ: Վերջինս կարողանում է հեշտությամբ զերծ մնալ խաբեությունից, բայց սովորաբար փոքր սահմաններում։
Այնուհետև նա պարզապես կանջատի ակնհայտ անսարք սենսորը, կսկսի կարգավորումը բոլոր մյուսների ընթերցումների համաձայն, կավելացնի XX-ի արագությունը և կսահմանի սխալի կոդը։
Սխալ DMRV-ն ստուգվում է ըստ սկաների տվյալների տարբեր ռեժիմներում, դրա ազդանշանը պետք է համապատասխանի տիպիկ հավաքածուին: Նույնը կարելի է անել մուլտիմետրով, բայց ոչ բոլոր շարժիչներում: Սենսորը պետք է փոխարինվի: Երբեմն դուք կարող եք լվանալ այն և վերականգնել այն, բայց միշտ չէ, որ պետք է հույս դնել դրա վրա:

РХХ սենսոր
Իրականում սա ոչ թե սենսոր է, այլ մղիչ: Բաղկացած է օդային փականից, որը կառավարվում է քայլային շարժիչով:
Խնդիրները առաջանում են շարժիչի աղտոտման, շնչափող սարքի, որտեղ կարգավորիչը տեղադրված է շրջանցիկ ալիքում, ինչպես նաև մեխանիկական մաշվածության պատճառով: IAC-ը փոխվում է նորով, և շնչափող սարքը պետք է հանվի և ամբողջությամբ լվացվի:

DPDZ
Շնչափողի դիրքի սենսորը կարող է ունենալ դիզայն պարզ պոտենցիոմետրի տեսքով՝ ածխի ճանապարհով և սահիկով: Այս մեխանիզմը ժամանակի ընթացքում մաշվում է և սկսում է ընդմիջումներ ու սխալներ տալ:
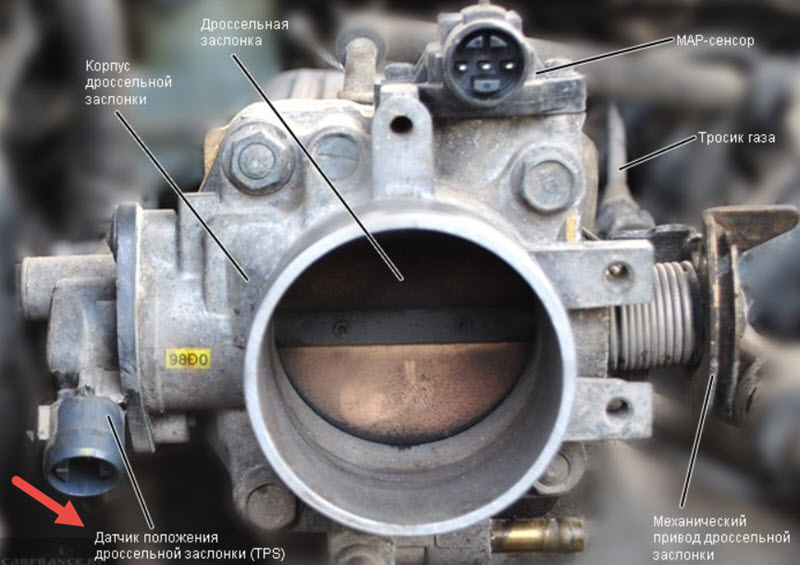
Այն էժան է, հեշտությամբ ախտորոշվում է սկաների միջոցով և արագ փոխարինվում: Երբեմն հնարավոր է վերականգնել աշխատանքը՝ կարգավորելով դիրքն այնպես, որ փակ կափույրը հստակ զրո տա համակարգչին։
Շնչափող
Շնչափողով օդի մատակարարման ալիքը հաճախ կեղտոտ է, որից հետո կափույրն ամբողջությամբ չի փակվում: Սա համարժեք է գազի ոտնակին թեթև սեղմելուն, ինչը հանգեցնում է արագության բարձրացման:
Ավելին, ոչ մի սխալ չի առաջանում, քանի որ TPS-ը նաև ազդանշան է տալիս փոքր բացման մասին: Լուծումը շնչափող խողովակը մաքրող միջոցներով լվանալն է։ Երբեմն նույնը տեղի է ունենում մաշվածության պատճառով: Այնուհետեւ ժողովը փոխարինվում է:
Շարժիչի ջերմաստիճանի տվիչ
Խառնուրդի բաղադրությունը կախված է շարժիչի ջերմաստիճանից: Երբ համապատասխան սենսորն աշխատում է մեծ սխալով, ECU-ն դա ուղղում է որպես անբավարար տաքացում՝ ավելացնելով պարապ արագությունը:
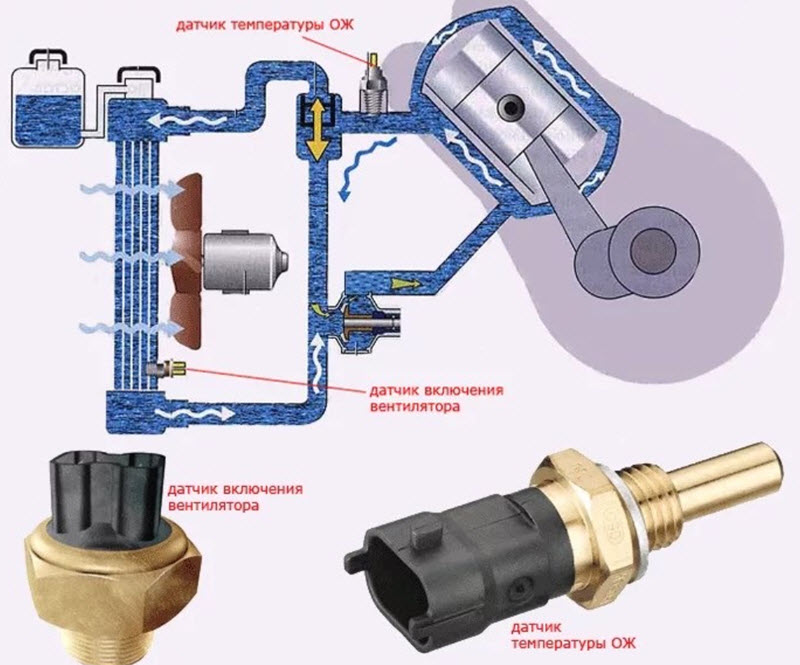
Համեմատելով իրական ջերմաստիճանը սկաների ընթերցումների հետ՝ հնարավոր է բացահայտել և մերժել դիզելային վառելիքը, որից հետո ամեն ինչ որոշվում է էժան փոխարինմամբ։
Ընդունման բազմազանություն
Ամբողջ ընդունման տրակտը պետք է կնքված լինի, քանի որ դրա մեջ վակուում կա, երբ շնչափողը փակ է: Ներդիրների կամ մասերի նյութի ցանկացած արտահոսք հանգեցնում է չհաշված օդի ներծծման, ընդհատումների և արագության բարձրացման:
Ախտորոշումը անհրաժեշտ է ծխի գեներատորի կամ ածխածնի թեստի միջոցով, այսինքն՝ կասկածելի վայրերը այրվող սփրեյներով թափելով:
ECU
Հազվադեպ, բայց ECU-ի սխալները տեղի են ունենում ծերությունից կամ ջրի ներթափանցումից հետո նրա կնքված կառուցվածք: Միավորը կարող է վերականգնվել մասնագետի մոտ զոդման միջոցով, կոնտակտները մաքրելով և տարրերը փոխարինելով:
Բայց հաճախ այն պարզապես փոխարինվում է նորով կամ հայտնի լավով մեքենայի ապամոնտաժումից: Իրականում ECU-ի խափանումները հանգեցնում են ավելի լուրջ դրսևորումների, քան արագության բարձրացումը։

Բարձր արագությամբ վարելն անցանկալի է։ Սա վթարային ռեժիմ է, որը կարող է հանգեցնել շարժիչի նոր խափանումների։ Բայց վերանորոգման վայր հասնելը միանգամայն թույլատրելի է ինքնուրույն:
