Ինչ է և ինչպես է աշխատում հարմարվողական կախոցը
Պարունակություն
Մեքենայի կախոցը բարելավելու եղանակներից մեկը այն հարմարեցնելն է ճանապարհի բնույթին, արագությանը կամ վարելու ոճին: Դա հնարավոր է իրականացնել էլեկտրոնային սարքավորումների և բարձր արագությամբ էլեկտրամագնիսական, օդաճնշական և հիդրավլիկ շարժիչների օգտագործմամբ: Նույն մեքենան, կասեցման բնութագրերի արագ փոփոխությամբ, կարող է ձեռք բերել ճանապարհային սպորտային մեքենայի, ամենագնացի կամ թեթև բեռնատարի անհատական ունակություններ: Կամ պարզապես զգալիորեն բարելավել ուղեւորների հարմարավետությունը:
Հարմարվողականության կազմակերպման հիմունքները
Արտաքին ազդեցություններին կամ վարորդի հրամաններին հարմարվելու կարողություն ձեռք բերելու համար կախոցը պետք է ձեռք բերի ակտիվ բնույթ: Պասիվ մեխանիզմները միշտ միանշանակ արձագանքում են որոշակի ազդեցությունների: Ակտիվները կարողանում են փոխել իրենց բնութագրերը։ Դա անելու համար նրանք ունեն կառավարման էլեկտրոնային միավոր, որը համակարգիչ է, որը տեղեկատվություն է հավաքում սենսորներից և մեքենայի այլ համակարգերից, հրահանգներ է ստանում վարորդից և մշակելուց հետո ռեժիմը սահմանում է ակտուատորներին:

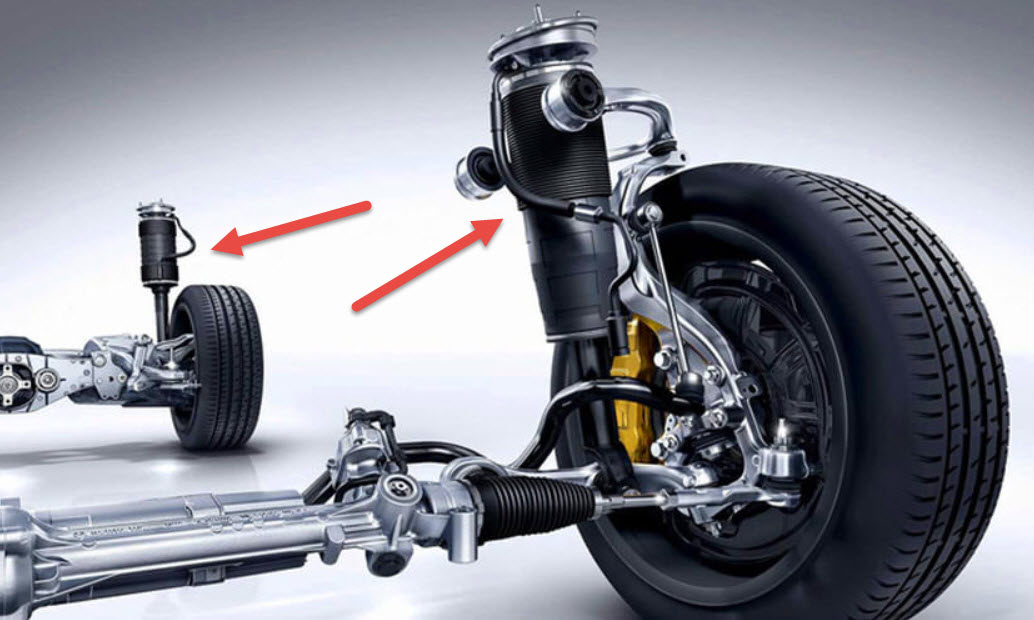
Ինչպես գիտեք, կախոցը բաղկացած է առաձգական տարրերից, խոնավացնող սարքերից և ուղեցույցից: Տեսականորեն հնարավոր է վերահսկել այս բոլոր բաղադրիչները, սակայն գործնականում բավական է փոխել կափույրների (հարվածային կլանիչների) հատկությունները: Սա համեմատաբար հեշտ է անել ընդունելի կատարողականությամբ: Թեև, եթե ռեակցիայի արագությունը չի պահանջվում, օրինակ, կայանման ռեժիմը, հողի մաքրման կամ ստատիկ կոշտության փոփոխությունը ենթակա են ճշգրտումների, ապա միանգամայն հնարավոր է հարմարեցնել կասեցման կոնֆիգուրացիան դրա բոլոր բաղադրիչների համար:
Գործառնական հարմարվելու համար անհրաժեշտ կլինի հաշվի առնել բազմաթիվ մուտքային պարամետրեր.
- տվյալներ ճանապարհի մակերևույթի անկանոնությունների վերաբերյալ՝ ինչպես ընթացիկ, այնպես էլ առաջիկայում.
- շարժման արագություն;
- ուղղությունը, այսինքն, ղեկի անիվների պտտման անկյունը և ամբողջությամբ մեքենայի անկյունային արագացումը.
- ղեկի պտտման դիրքը և արագությունը;
- վարորդի պահանջները՝ ըստ նրա վարելու ոճի վերլուծության, ինչպես նաև ձեռքով ռեժիմում մուտքագրվածների.
- մարմնի դիրքը ճանապարհի նկատմամբ, ժամանակի ընթացքում դրա փոփոխության պարամետրերը.
- ռադարային տիպի սենսորային ազդանշաններ, որոնք վերլուծում են մեքենայի առջև գտնվող ծածկույթի վիճակը.
- մեքենայի, շարժիչի և արգելակման համակարգի աշխատանքային ռեժիմների երկայնական և լայնակի արագացումներ.
Կառավարման բլոկի ծրագիրը պարունակում է ալգորիթմներ բոլոր մուտքային ազդանշաններին արձագանքելու և տեղեկատվություն կուտակելու համար: Հրամանները սովորաբար ուղարկվում են բոլոր անիվների էլեկտրական կառավարվող շոկի կլանիչներին, յուրաքանչյուրի համար առանձին, ինչպես նաև հակագլորման ձողերի ակտիվ ագույցներին: Կամ սարքերին, որոնք փոխարինում են դրանք ամբողջությամբ հիդրավլիկ կառավարվող կախոցների մաս աշխատելիս, ինչպես նաև ամենաբարձր տեխնոլոգիական արտադրանքներին, որոնք աշխատում են բացառապես էլեկտրամագնիսական փոխազդեցության վրա: Վերջին դեպքում արձագանքման արագությունն այնքան բարձր է, որ կասեցման գործարկումից կարելի է ձեռք բերել գրեթե իդեալական վարք։
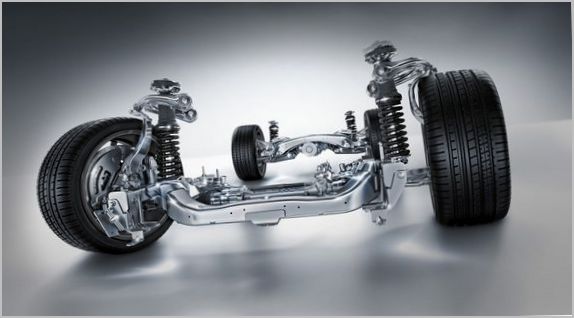
Համակարգի կազմը
Համալիրը ներառում է սարքեր, որոնք ապահովում են խոնավեցման հատկությունների և դինամիկ կոշտության կարգավորումը, ինչպես նաև մարմնի գլորումը նվազագույնի հասցնելը.
- կասեցման կարգավորիչ միկրոպրոցեսորով, հիշողությամբ և I/O սխեմաներով;
- գլանափաթեթի ակտիվ մեխանիզմներ (վերահսկվող հակա-գլորման ձողեր);
- սենսորների համալիր;
- ցնցող կլանիչներ, որոնք թույլ են տալիս էլեկտրոնային վերահսկել կոշտությունը:
Վահանակի կառավարումը, ամենից հաճախ սա ինտերակտիվ էկրան է, վարորդը կարող է սահմանել գործառնական ռեժիմներից մեկը՝ ըստ իր նախասիրությունների: Թույլատրվում է հարմարավետության, սպորտային կամ արտաճանապարհային հնարավորությունների գերակշռում, ինչպես նաև ռեժիմի հիշողությամբ գործառույթների ավելի առաջադեմ հարմարեցում: Կուտակված հարմարվողականությունը կարող է անմիջապես վերականգնվել սկզբնական կարգավորումներին:

Լայնակի կայունացուցիչների պահանջները միշտ հակասական են: Մի կողմից, նրանց նպատակն է ապահովել մարմնի նվազագույն գլորում: Բայց այս կերպ կախոցը ձեռք է բերում կախվածության բնույթ, ինչը նշանակում է, որ հարմարավետությունը նվազում է։ Վատ ճանապարհներով վարելիս առավել արժեքավոր հատկանիշը կլինի առանձին անիվների էլ ավելի ազատությունը՝ առանցքների առավելագույն հոդացման հասնելու համար: Միայն այս կերպ կասեցման ճանապարհորդական պահուստները լիովին կօգտագործվեն անվադողերի մշտական շփումը ծածկույթի հետ ապահովելու համար: Մշտական կոշտություն ունեցող կայունացուցիչը, որը սովորաբար զսպանակային պողպատի պարզ ձող է, որն աշխատում է ոլորման ձողերի սկզբունքով, չի կարողանա հավասարապես լավ ծառայել բոլոր պայմաններում:
Ակտիվ կախոցներում կայունացուցիչը պառակտված է՝ էլեկտրոնային կարգավորման հնարավորությամբ։ Նվազեցված կոշտությունը վերահսկելու համար կարող են օգտագործվել տարբեր սկզբունքներ: Որոշ արտադրողներ փոխանցումատուփով էլեկտրական շարժիչով պտտվելու համար օգտագործում են նախաբեռնվածություն, մյուսները օգտագործում են հիդրավլիկ մեթոդ՝ տեղադրելով հիդրավլիկ բալոններ կայունացուցիչի վրա կամ դրա կցումը մարմնին: Հնարավոր է նաև ամբողջությամբ ընդօրինակել կայունացուցիչի բարը առաձգական տարրերին զուգահեռ գործող առանձին հիդրավլիկ բալոններով:
Կարգավորելի ցնցող կլանիչներ
Սովորական հարվածային կլանիչն ունի իր դինամիկ կոշտությունը փոխելու հատկությունը՝ կախված ձողի շարժման արագությունից և արագացումից: Դա ձեռք է բերվում շնչափող փականների համակարգի միջոցով, որոնց միջով հոսում է խոնավացնող հեղուկը:
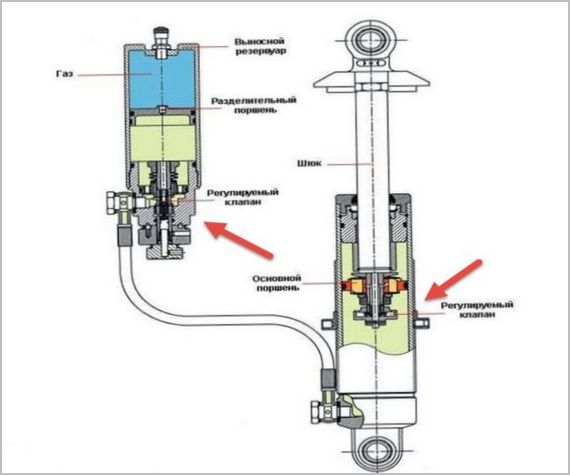
Շրջանցիկ շնչափողերի գործառնական վերահսկման համար հնարավոր է երկու եղանակ՝ կծիկի տիպի էլեկտրամագնիսական փականների տեղադրում կամ մագնիսական դաշտում հեղուկի հատկությունների փոփոխություն: Արտադրողները օգտագործում են երկու մեթոդները, երկրորդը ավելի քիչ հաճախ, քանի որ դրա համար կպահանջվի հատուկ հեղուկ, որը փոխում է իր մածուցիկությունը մագնիսական դաշտում:
Հարմարվողական կախոցների հիմնական գործառնական տարբերությունները
Հարմարվողականության հատկությամբ ակտիվ կախոցները հնարավորություն են տալիս ծրագրավորել վերահսկել մեքենայի սպառողական որակները ցանկացած ճանապարհի վրա.
- մարմինը միշտ պահպանում է տվյալ դիրքը ճանապարհի նկատմամբ, որից շեղումները որոշվում են միայն հարմարվողական համակարգի արագությամբ.
- անիվները ծածկույթի հետ ունեն առավելագույն հասանելի մշտական շփում.
- խցիկում բախումներից արագացման մակարդակը շատ ավելի ցածր է, քան ավանդական կախոցը, ինչը մեծացնում է ճանապարհորդության հարմարավետությունը.
- մեքենան ավելի լավ է կառավարվում և ավելի կայուն է բարձր արագությամբ.
- Ամենաառաջադեմ համակարգերը կարող են կանխատեսել բախումները՝ սկանավորելով ճանապարհը անիվների առաջ և նախապես կարգավորելով կափույրները:
Թերությունը, ինչպես բոլոր բարդ համակարգերի դեպքում, մեկն է՝ բարձր բարդությունը և հարակից հուսալիության և ծախսերի ցուցանիշները: Հետևաբար, հարմարվողական կախոցները օգտագործվում են պրեմիում սեգմենտում կամ որպես լրացուցիչ սարքավորումներ:
Աշխատանքի ալգորիթմները և սարքավորումների հավաքածուն անընդհատ դառնում են ավելի բարդ և կատարելագործված: Ակտիվ հարմարվողական կախոցների ոլորտում զարգացումների հիմնական նպատակը մեքենայի մարմնի առավելագույն հանգստի հասնելն է, անկախ նրանից, թե ինչ է պատահում անիվների և դրանց հետ կապված չզսպված զանգվածների հետ: Այս դեպքում բոլոր չորս անիվները պետք է անընդհատ կապ պահպանեն ճանապարհի հետ՝ մեքենան պահելով տվյալ հետագծի վրա։