Ranնկաձեւ լիսեռի դիրքի սենսոր
Պարունակություն
Ծնկաձև լիսեռի սենսորը շարժիչի ECU-ից ապահովում է վառելիքի ներարկման համակարգի աշխատանքի համար պատասխանատու մեխանիկական մասի դիրքի վերահսկում: Երբ DPKV-ն ձախողվում է, այն ախտորոշվում է օմմետրի սկզբունքով գործող հատուկ թեստերի օգնությամբ: Այն դեպքում, երբ ընթացիկ դիմադրությունը ցածր է անվանական արժեքից, կարգավորիչը պետք է փոխարինվի:
Ինչի համար է պատասխանատու և ինչպես է աշխատում ծնկաձև լիսեռի սենսորը:
Ծնկաձև լիսեռի դիրքի սենսորը հստակ որոշում է, թե երբ վառելիքը պետք է ուղարկվի ներքին այրման շարժիչի (ICE) բալոններին: Տարբեր ձևավորումներում DPKV-ն պատասխանատու է ներարկիչների կողմից վառելիքի մատակարարման միատեսակության ճշգրտման վերահսկման համար:
Ծնկաձև լիսեռի սենսորի գործառույթներն են՝ գրանցել և համակարգչին փոխանցել հետևյալ տվյալները.
- չափել ծնկաձև լիսեռի դիրքը;
- այն պահին, երբ մխոցները անցնում են BDC և TDC առաջին և վերջին բալոններում:
PKV սենսորը շտկում է հետևյալ ցուցանիշները.
- մուտքային վառելիքի քանակը;
- բենզինի մատակարարման ժամկետները;
- camshaft անկյուն;
- բոցավառման ժամանակը;
- ադսորբցիոն փականի աշխատանքի պահը և տևողությունը.
Ժամանակի սենսորի շահագործման սկզբունքը.
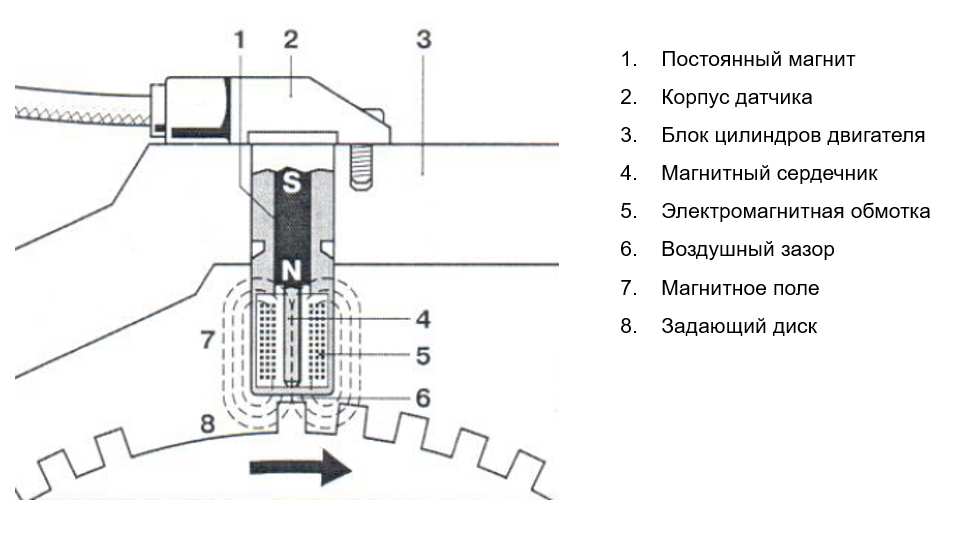
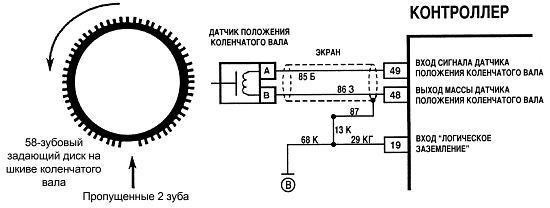
- Լեռնաձև լիսեռը հագեցած է ատամներով սկավառակով (մեկնարկ և զրոյացում): Երբ հավաքը պտտվում է, մագնիսական դաշտը PKV սենսորից ուղղվում է դեպի ատամները՝ ազդելով դրա վրա։ Փոփոխությունները գրանցվում են իմպուլսների տեսքով և տեղեկատվությունը փոխանցվում է համակարգչին. չափվում է ծնկաձև լիսեռի դիրքը և գրանցվում է այն պահը, երբ մխոցները անցնում են վերին և ստորին մեռյալ կենտրոններով (TDC և BDC):
- Երբ պտուտակն անցնում է ծնկաձև լիսեռի արագության սենսորով, այն փոխում է խթանման ցուցիչի տեսակը: Այդ պատճառով ECU-ն փորձում է վերականգնել ծնկաձև լիսեռի բնականոն աշխատանքը:
- Ստացված իմպուլսների հիման վրա բորտ համակարգիչը ազդանշան է ուղարկում մեքենայի անհրաժեշտ համակարգերին։
DPKV սարք
Ծնկաձև լիսեռի սենսորի ձևավորում.
- զգայուն տարրով գլանաձև կամ պլաստիկ պատյան, որի միջոցով ազդանշան է ուղարկվում համակարգչին.
- կապի մալուխ (մագնիսական միացում);
- շարժիչային միավոր;
- հերմետիկ;
- ոլորուն;
- շարժիչի ամրացման բրա:
Աղյուսակ՝ սենսորների տեսակները
| անուն | Նկարագրություն |
| Մագնիսական սենսոր
| Սենսորը բաղկացած է մշտական մագնիսից և կենտրոնական ոլորունից, և այս տեսակի կարգավորիչը չի պահանջում առանձին էլեկտրամատակարարում: Ինդուկտիվ էլեկտրական սարքը վերահսկում է ոչ միայն ծնկաձև լիսեռի դիրքը, այլև արագությունը: Այն աշխատում է այն լարման հետ, որն առաջանում է, երբ մետաղական ատամը (պիտակը) անցնում է մագնիսական դաշտով։ Սա առաջացնում է ազդանշանային իմպուլս, որը գնում է դեպի ECU: |
| օպտիկական սենսոր
| Օպտիկական սենսորը բաղկացած է ընդունիչից և LED-ից: Շփվելով համաժամացման սկավառակի հետ՝ այն արգելափակում է ստացողի և LED-ի միջև անցնող օպտիկական հոսքը: Հաղորդիչը հայտնաբերում է լույսի ընդհատումները: Երբ LED-ն անցնում է մաշված ատամներով տարածքով, ընդունիչը արձագանքում է զարկերակին և կատարում է համաժամացում ECU-ի հետ: |
| Դահլիճի ցուցիչ
| Սենսորային դիզայնը ներառում է.
Հոլլ էֆեկտի ծնկաձև լիսեռի սենսորում հոսանք է հոսում, երբ մոտենում է փոփոխվող մագնիսական դաշտին: Ուժային դաշտի միացումը բացվում է մաշված ատամներով տարածքներով անցնելիս և ազդանշանը փոխանցվում է շարժիչի էլեկտրոնային կառավարման միավորին: Աշխատում է անկախ էներգիայի աղբյուրից: |


Որտեղ է գտնվում սենսորը:
Ծղկաձև լիսեռի դիրքի ցուցիչի գտնվելու վայրը. սկավառակի կողքին՝ փոփոխականի ճախարակի և ճախարակի միջև: Բորտային ցանցին անվճար միանալու համար տրամադրվում է 50-70 սմ երկարությամբ մալուխ, որի վրա կան բանալիների միակցիչներ։ Թամբի վրա կան միջատներ՝ բացը 1-1,5 մմ սահմանելու համար։
Անսարքությունների նշաններն ու պատճառները
Կոտրված DPKV-ի ախտանիշները.
- շարժիչը որոշ ժամանակ անց չի սկսվում կամ ինքնաբերաբար կանգ է առնում.
- ոչ մի կայծ;
- ICE պայթյունը պարբերաբար տեղի է ունենում դինամիկ բեռների տակ.
- անկայուն պարապ արագություն;
- շարժիչի հզորությունը և մեքենայի դինամիկան նվազում են.
- ռեժիմները փոխելիս տեղի է ունենում հեղափոխությունների քանակի ինքնաբուխ փոփոխություն.
- ստուգեք շարժիչի լույսը վահանակի վրա:
Ախտանիշները ցույց են տալիս հետևյալ պատճառները, թե ինչու PCV սենսորը կարող է անսարք լինել.
- ոլորուն պտույտների միջև կարճ միացում, մխոցի դիրքի մասին ազդանշանի հնարավոր աղավաղում BDC-ում և TDC-ում.
- DPKV-ն ECU-ին միացնող մալուխը վնասված է. բորտ համակարգիչը պատշաճ ծանուցում չի ստանում.
- ատամների թերություն (ճաքեր, չիպսեր, ճաքեր), շարժիչը կարող է չգործարկվել;
- Օտար առարկաների ներթափանցումը ատամնավոր ճախարակի և հաշվիչի միջև կամ վնասը շարժիչի խցիկում աշխատելիս հաճախ առաջացնում է DPKV-ի անսարքություն:
Շարժիչի գործարկման հետ կապված խնդիրներ
Ծնկաձև լիսեռի սենսորի անսարքությունների տարբերակները, որոնք ազդում են ներքին այրման շարժիչի աշխատանքի վրա.
- Շարժիչը չի սկսվում: Երբ բոցավառման բանալին պտտվում է, մեկնարկիչը միացնում է շարժիչը, և վառելիքի պոմպը բզզում է: Պատճառն այն է, որ շարժիչի ECU-ն, առանց ծնկաձև լիսեռի դիրքի սենսորից ազդանշան ստանալու, չի կարող ճիշտ հրաման տալ՝ բալոններից որն է սկսել և որի վրա բացել վարդակը:
- Շարժիչը տաքանում է մինչև որոշակի ջերմաստիճան և կանգ է առնում կամ չի սկսվում սաստիկ սառնամանիքի ժամանակ: Կա միայն մեկ պատճառ՝ միկրոճաք PKV սենսորային ոլորուն:
Շարժիչի անկայուն շահագործումը տարբեր ռեժիմներում
Դա տեղի է ունենում, երբ DPKV-ն աղտոտված է, հատկապես, երբ դրա մեջ մտնում են մետաղական չիպսեր կամ յուղ: Նույնիսկ աննշան ազդեցությունը ժամանակի սենսորի մագնիսական միկրոշրջանի վրա փոխում է նրա աշխատանքը, քանի որ հաշվիչը շատ զգայուն է:
Շարժիչի պայթյունի առկայությունը աճող բեռով
Ամենատարածված պատճառը հաշվիչի խափանումն է, ինչպես նաև ոլորուն միկրոճեղքը, որը թեքվում է թրթռման ժամանակ, կամ պատյանի ճեղքը, որի մեջ խոնավություն է մտնում:
Շարժիչի թակոցի նշաններ.
- ներքին այրման շարժիչի բալոններում վառելիք-օդ խառնուրդի այրման գործընթացի սահունության խախտում.
- ցատկել ընդունիչի կամ արտանետման համակարգի վրա;
- ձախողում;
- շարժիչի հզորության հստակ նվազում:
Շարժիչի հզորության նվազում
Շարժիչի հզորությունը նվազում է, երբ վառելիք-օդ խառնուրդը ժամանակին չի մատակարարվում: Անսարքության պատճառը հարվածային կլանիչի շերտազատումն է և ատամնավոր աստղի տեղաշարժը ճախարակի նկատմամբ։ Շարժիչի հզորությունը նվազում է նաև ծնկաձև լիսեռի դիրքաչափի ոլորուն կամ պատյանին վնասելու պատճառով:
Ինչպե՞ս ինքներդ ստուգել ծնկաձև լիսեռի սենսորը:
Դուք կարող եք ինքնուրույն ուսումնասիրել DPKV-ի առողջական վիճակը՝ օգտագործելով.
- օմմետր;
- օսցիլոգրաֆ;
- համալիր, օգտագործելով մուլտիմետր, մեգոհմետր, ցանցային տրանսֆորմատոր:
Կարեւոր է իմանալ
Նախքան չափիչ սարքը փոխարինելը, խորհուրդ է տրվում կատարել նաև ներքին այրման շարժիչի համակարգչային ամբողջական ախտորոշում։ Այնուհետև կատարվում է արտաքին զննում` վերացնելով աղտոտումը կամ մեխանիկական վնասը: Եվ միայն դրանից հետո են սկսում ախտորոշել հատուկ սարքերով։
Օմմետրով ստուգում
Նախքան ախտորոշմանը անցնելը, անջատեք շարժիչը և հեռացրեք ժամանակի սենսորը:
Տանը օմմետրով DPKV-ն ուսումնասիրելու քայլ առ քայլ հրահանգներ.
- Տեղադրեք օմմետր դիմադրությունը չափելու համար:
- Որոշեք շնչափողի դիմադրության աստիճանը (հպեք ստուգիչի զոնդերը տերմինալներին և զանգահարեք դրանք):
- Ընդունելի արժեքը 500-ից 700 ohms է:
Օգտագործելով օսցիլոսկոպ
ծնկաձև լիսեռի դիրքի սենսորը ստուգվում է շարժիչի միացման ժամանակ:
Գործողությունների ալգորիթմ՝ օգտագործելով օսցիլոսկոպ.
- Միացրեք փորձարկիչը ժամանակաչափին:
- Գործարկեք մի ծրագիր համակարգչի վրա, որը վերահսկում է էլեկտրոնային սարքի ընթերցումները:
- Մի քանի անգամ անցեք մետաղական առարկա ծնկաձև լիսեռի սենսորի դիմաց:
- Մուլտիմետրը նորմալ է, եթե օսցիլոսկոպը արձագանքում է շարժմանը: Եթե համակարգչի էկրանին ազդանշաններ չկան, խորհուրդ է տրվում կատարել ամբողջական ախտորոշում:

Համապարփակ ստուգում
Այն իրականացնելու համար դուք պետք է ունենաք.
- մեգոհմմետր;
- ցանցային տրանսֆորմատոր;
- ինդուկտիվության հաշվիչ;
- վոլտմետր (ցանկալի է թվային):
Գործողությունների ալգորիթմ.
- Նախքան ամբողջական սկանավորումը սկսելը, սենսորը պետք է հեռացվի շարժիչից, մանրակրկիտ լվացվի, չորանա և այնուհետև չափվի: Այն իրականացվում է միայն սենյակային ջերմաստիճանում, որպեսզի ցուցանիշներն ավելի ճշգրիտ լինեն։
- Նախ, չափվում է սենսորի ինդուկտիվությունը (ինդուկտիվ կծիկ): Նրա թվային չափումների գործառնական տիրույթը պետք է լինի 200-ից 400 ՄՀց-ի միջև: Եթե արժեքը մեծապես տարբերվում է նշված արժեքից, ապա հավանական է, որ սենսորը սխալ է:
- Հաջորդը, դուք պետք է չափեք մեկուսացման դիմադրությունը կծիկի տերմինալների միջև: Դա անելու համար օգտագործեք մեգաոհմմետր՝ ելքային լարումը դնելով 500 Վ: Ավելի ճշգրիտ տվյալներ ստանալու համար ավելի լավ է չափման ընթացակարգն իրականացնել 2-3 անգամ: Մեկուսացման դիմադրության չափված արժեքը պետք է լինի առնվազն 0,5 MΩ: Հակառակ դեպքում, կծիկի մեջ մեկուսացման ձախողումը կարող է որոշվել (ներառյալ շրջադարձերի միջև կարճ միացման հնարավորությունը): Սա ցույց է տալիս սարքի խափանումը:
- Այնուհետեւ, օգտագործելով ցանցային տրանսֆորմատոր, ժամանակի սկավառակը ապամագնիսացվում է:
Խնդիր կրակոց
Իմաստ ունի սենսորը վերանորոգել այնպիսի անսարքությունների համար, ինչպիսիք են.
- ներթափանցում PKV աղտոտման սենսորի մեջ;
- ջրի առկայությունը սենսորային միակցիչում;
- մալուխների կամ սենսորային ամրագոտիների պաշտպանիչ ծածկույթի պատռվածք;
- ազդանշանային մալուխների բևեռականության փոփոխություն;
- կապ չկա ամրագոտու հետ;
- կարճ ազդանշանային լարեր դեպի սենսորային հող;
- կրճատվել կամ ավելացել է սենսորի և համաժամացման սկավառակի մոնտաժային մաքրությունը:
Աղյուսակ՝ աշխատանք աննշան թերություններով
| Default | Խնամք |
|---|---|
| Ներթափանցում PKV սենսորի ներսում և աղտոտում |
|
| Սենսորային միակցիչում ջրի առկայությունը |
|
| Կոտրված սենսորային մալուխի վահան կամ ամրագոտի |
|
| Փոխեք ազդանշանային մալուխների բևեռականությունը |
|
| Սենսորը միացված չէ ամրագոտիին |
|
| Սենսորային ազդանշանի լարերը կարճ են գետնին |
|
| Սենսորի և համաժամացնող սկավառակի մոնտաժային բացվածքի կրճատում կամ ավելացում |
|
Ինչպե՞ս փոխել ծնկաձև լիսեռի դիրքի սենսորը:
Կարևոր նրբերանգներ, որոնք պետք է պահպանվեն DPKV-ն փոխարինելիս.
- Նախքան ապամոնտաժելը, անհրաժեշտ է կիրառել նշաններ, որոնք ցույց են տալիս պտուտակի դիրքը սենսորին, հենց DPKV-ին, ինչպես նաև լարերի և էլեկտրական կոնտակտների նշումը:
- Նոր PKV սենսորը հեռացնելիս և տեղադրելիս խորհուրդ է տրվում համոզվել, որ ժամանակի սկավառակը լավ վիճակում է:
- Հաշվիչը փոխարինեք ամրագոտիով և որոնվածով:
PKV սենսորը փոխարինելու համար ձեզ հարկավոր է.
- նոր չափիչ սարք;
- ավտոմատ փորձարկիչ;
- քարանձավաչափ;
- բանալին 10.
Գործողությունների ալգորիթմ
Ձեր սեփական ձեռքերով ծնկաձև լիսեռի դիրքի սենսորը փոխելու համար ձեզ հարկավոր է.
- Անջատեք բռնկումը:
- Անջատեք էլեկտրոնային սարքը՝ անջատելով տերմինալային բլոկը կարգավորիչից:
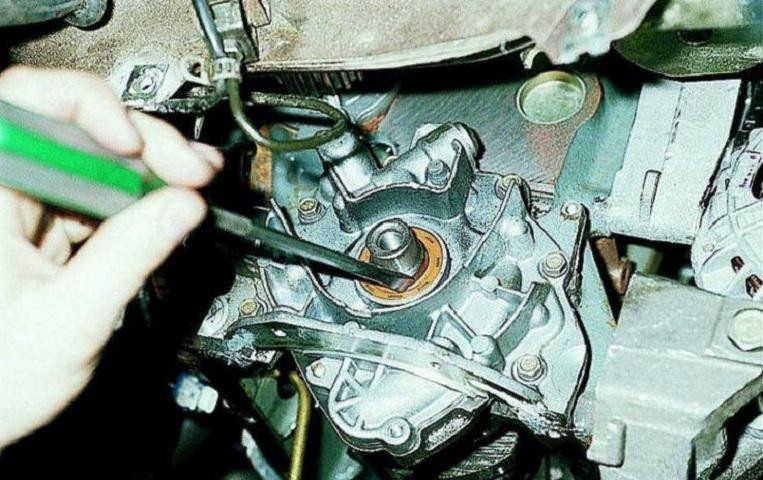
- Պտուտակով պտուտակահանեք սենսորը ամրացնող պտուտակը, հեռացրեք անսարք DPKV-ն:
- Օգտագործեք լաթի վայրէջքի վայրը յուղոտ նստվածքներից և կեղտից մաքրելու համար:
- Տեղադրեք նոր ճնշման չափիչը՝ օգտագործելով հին ամրացումները:
- Կատարեք փոփոխիչի շարժիչի ճախարակի ատամների և սենսորային միջուկի միջև եղած բացի հսկիչ չափումները՝ օգտագործելով վերնիե տրամաչափ: Տարածքը պետք է համապատասխանի հետևյալ արժեքներին՝ 1,0 + 0,41 մմ: Եթե հսկողության չափման ընթացքում բացը փոքր է (ավելի մեծ), քան նշված արժեքը, ապա սենսորի դիրքը պետք է շտկվի:
- Ստուգեք ծնկաձև լիսեռի դիրքի սենսորի դիմադրությունը՝ օգտագործելով ինքնաստուգում: Աշխատանքային սենսորի համար այն պետք է լինի 550-ից 750 ohms միջակայքում:
- Վերակայեք ճամփորդական համակարգիչը՝ Check Engine ազդանշանն անջատելու համար:
- Միացրեք ծնկաձև լիսեռի դիրքի սենսորը ցանցին (դրա համար տեղադրված է միակցիչ):
- Ստուգեք էլեկտրական սարքի աշխատանքը տարբեր ռեժիմներում՝ հանգստի և դինամիկ բեռի տակ:
