4 Վերահսկում
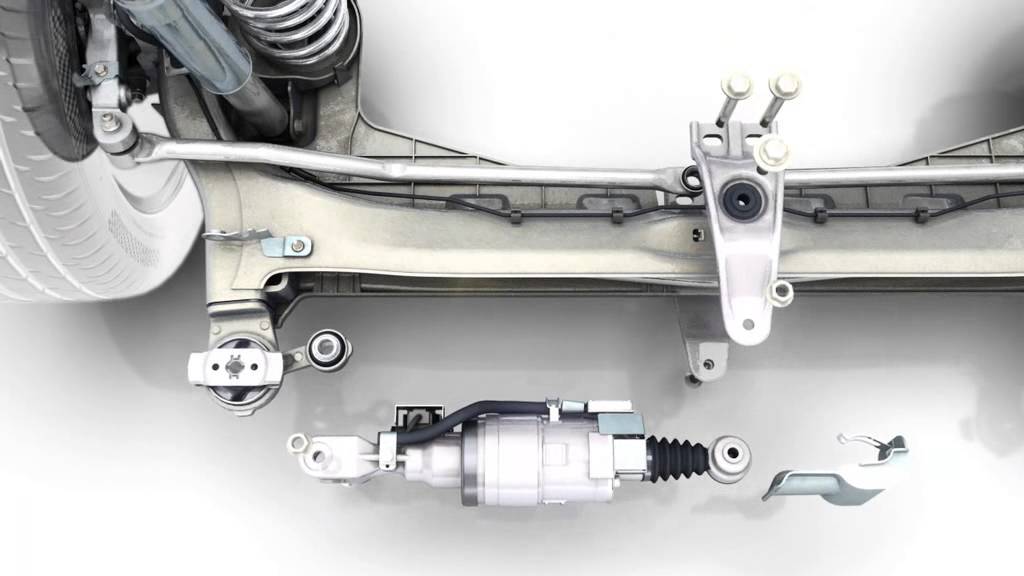
Renault-ի կողմից մշակված քառանիվ ղեկային համակարգը ամբողջությամբ հիմնված է ավտոմեքենայի դինամիկայի էլեկտրոնային կառավարման վրա (ABS, ESP և այլն):
60 կմ/ժ-ից ցածր արագության դեպքում հետևի անիվները պտտվում են առջևի գնացքի հակառակ ուղղությամբ՝ նվազեցնելով շրջադարձի շառավիղը և օգնելով բարելավել մեքենայի կառավարումը ոլորապտույտ ճանապարհներին:
Երբ այս արագությունը գերազանցում է, հետևի անիվները պտտվում են նույն ուղղությամբ, ինչ առջևի անիվները, ինչը հանգեցնում է չափազանց ճշգրիտ հետագծի և պտույտի կրճատման:

