
Ձեռնարկի փոխանցումատուփ - ռոբոտացված փոխանցումատուփ
Պարունակություն
Modernանկացած ժամանակակից մեքենա չի կարող սահուն գործարկել և շարժվել սահուն, եթե իր սարքում փոխանցում չկա: Այսօր առկա է ամեն տեսակի փոխանցումատուփի բազմազանություն, որոնք ոչ միայն վարորդին հնարավորություն են տալիս ընտրել իր նյութական հնարավորություններին համապատասխան տարբերակ, այլև հնարավորություն են տալիս մեքենայից առավելագույն հարմարավետություն ստանալ:
Համառոտ հաղորդման հիմնական տեսակների մասին նկարագրված է առանձին վերանայում... Այժմ եկեք ավելի մանրամասն խոսենք այն մասին, թե ինչ է ռոբոտացված փոխանցումատուփը, դրա հիմնական տարբերությունները մեխանիկական փոխանցումատուփից, ինչպես նաև հաշվի առնենք այս միավորի աշխատանքի սկզբունքը:
Ինչ է ռոբոտացված փոխանցումատուփը
Փոխանցման տուփի աշխատանքը գրեթե նույնական է մեխանիկական անալոգին `բացառությամբ որոշ հատկությունների: Ռոբոտի սարքը ներառում է բազմաթիվ մասեր, որոնք կազմում են տուփի մեխանիկական տարբերակը, որը արդեն ծանոթ է բոլորին: Ռոբոտացվածի հիմնական տարբերությունն այն է, որ դրա կառավարումը միկրոպրոցեսորային տիպի է: Նման փոխանցումատուփերում փոխանցման տուփը կատարվում է էլեկտրոնիկայի միջոցով ՝ շարժիչի, գազի ոտնակի և անիվների սենսորների տվյալների հիման վրա:

Ռոբոտացված տուփը կարելի է անվանել նաև ավտոմատ մեքենա, բայց սա սխալ անուն է: Փաստն այն է, որ ավտոմատ փոխանցումը հաճախ օգտագործվում է որպես ընդհանրացնող հասկացություն: Այսպիսով, նույն փոփոխիչը ունի ավտոմատ ռեժիմ ՝ հանդերձանքի հարաբերակցությունները փոխելու համար, այնպես որ ոմանց համար դա նաև ավտոմատ է: Փաստորեն, ռոբոտը կառուցվածքով և գործունեության սկզբունքով ավելի մոտ է մեխանիկական արկղին:
Արտաքին տեսանկյունից անհնար է տարբերակել ավտոմատ փոխանցումատուփից և մեխանիկական փոխանցումատուփից, քանի որ դրանք կարող են ունենալ նույնական ընտրիչ և թափք: Փոխանցման տուփը կարող եք ստուգել միայն այն ժամանակ, երբ մեքենան վարում է: Յուրաքանչյուր տեսակի միավոր ունի աշխատանքի իր առանձնահատկությունները:
Ռոբոտացված փոխանցման տուփի հիմնական նպատակը մեքենա վարելը հնարավորինս հեշտացնելն է: Վարորդը կարիք չունի ինքնուրույն փոխել փոխանցման տուփը. Կառավարման աշխատանքը կատարում է այս աշխատանքը: Հարմարավետությունից բացի, ավտոմատ փոխանցումատուփի արտադրողները ձգտում են իրենց ապրանքներն ավելի էժան դարձնել: Այսօր ռոբոտը մեխանիկայից հետո փոխանցման տուփի ամեն բյուջետային տեսակն է, բայց այն չի ապահովում վարելու այնպիսի հարմարավետություն, ինչպիսին է փոփոխիչը կամ ավտոմատը:
Ռոբոտացված փոխանցումատուփի սկզբունքը
Ռոբոտային փոխանցումը կարող է անցնել հաջորդ արագության կամ ինքնաբերաբար, կամ կիսաավտոմատ: Առաջին դեպքում միկրոպրոցեսորային միավորը ազդանշաններ է ստանում սենսորներից, որոնց հիման վրա գործարկվում է արտադրողի կողմից ծրագրավորված ալգորիթմը:
Փոխանցման տուփերի մեծ մասը հագեցած է ձեռքի ընտրիչով: Այս դեպքում արագությունները դեռ ավտոմատ կերպով միանում են: Միակ բանն այն է, որ վարորդը կարող է ինքնուրույն ազդանշել վեր կամ վար հանդերձանքի միացման պահը: Tiptronic տիպի որոշ ավտոմատ փոխանցումներ ունեն նման սկզբունք:
Արագությունը մեծացնելու կամ նվազեցնելու համար վարորդը ընտրիչի լծակը տեղափոխում է դեպի + կամ դեպի - դեպի: Այս տարբերակի շնորհիվ որոշ մարդիկ այս փոխանցումն անվանում են հաջորդական կամ հաջորդական:
Ռոբոտացված տուփն աշխատում է ըստ հետևյալ սխեմայի.
- Վարորդը սեղմում է արգելակը, սկսում է շարժիչը և շարժման ռեժիմի ընտրիչի լծակը տեղափոխում է Դ դիրքի
- Միավորի ազդանշանն անցնում է տուփի կառավարման միավորին.
- Կախված ընտրված ռեժիմից ՝ կառավարման միավորը ակտիվացնում է համապատասխան ալգորիթմը, ըստ որի միավորը գործելու է.
- Շարժման գործընթացում սենսորները ազդանշաններ են ուղարկում «ռոբոտի ուղեղին» մեքենայի արագության, էներգաբլոկի բեռի, ինչպես նաև փոխանցման տուփի ընթացիկ ռեժիմի մասին.
- Հենց ցուցիչները դադարեն համապատասխանել գործարանից տեղադրված ծրագրին, կառավարման միավորը հրաման է արձակում փոխել այլ հանդերձանքի: Սա կարող է լինել կամ արագության բարձրացում կամ նվազում:
Երբ վարորդը մեքենայով մեքենա է վարում, նա պետք է զգա իր փոխադրամիջոցը `որոշելու համար, թե երբ է այլ արագության անցնելու պահը: Ռոբոտացված անալոգում նման գործընթաց է տեղի ունենում, միայն վարորդը կարիք չունի մտածելու, թե երբ է տեղափոխման լծակը տեղափոխելու ցանկալի դիրքը: Փոխարենը, միկրոպրոցեսորն է դա անում:
Համակարգը վերահսկում է բոլոր տվիչներից ստացված բոլոր տեղեկությունները և ընտրում է օպտիմալ հանդերձում որոշակի բեռի համար: Որպեսզի էլեկտրոնիկան կարողանա փոխել փոխանցումատուփը, փոխանցման տուփն ունի հիդրոմեխանիկական մղիչ: Ավելի տարածված տարբերակում, հիդրոմեխանիկի փոխարեն, տեղադրվում է էլեկտրական սկավառակ կամ սերվո սկավառակ, որը միացնում / անջատում է կալանքը տուփի մեջ (ի դեպ, սա որոշ նմանություններ ունի ավտոմատ փոխանցումատուփի հետ. Կալանքը տեղակայված է ոչ թե այնտեղ, որտեղ գտնվում է մեխանիկական փոխանցման տուփում, մասնավորապես ՝ պտտաձողի մոտ, այլ հենց պատյանում: փոխանցում).
Երբ կառավարման միավորը ազդանշան է տալիս, որ ժամանակն է անցնել այլ արագության, առաջինը ակտիվանում է առաջին էլեկտրական (կամ հիդրոմեխանիկական) servo drive- ը: Այն անջատում է կալանքի շփման մակերեսները: Երկրորդ servo- ն այնուհետև մեխանիզմում փոխանցումատուփերը տեղափոխում է ցանկալի դիրք: Դրանից հետո առաջինը դանդաղ արձակում է կալանքը: Այս դիզայնը թույլ է տալիս մեխանիզմը աշխատել առանց վարորդի մասնակցության, հետևաբար, ռոբոտացված փոխանցումատուփով մեքենան չունի կցորդիչի ոտնակ:

Ընտրիչի վրա տեղադրված շատ փոխանցումատուփերի վրա հարկադրված դիրքի դիրքեր են: Այս, այսպես կոչված, tiptronic- ը վարորդին հնարավորություն է տալիս ինքնուրույն վերահսկել ավելի բարձր կամ ցածր արագության անցնելու պահը:
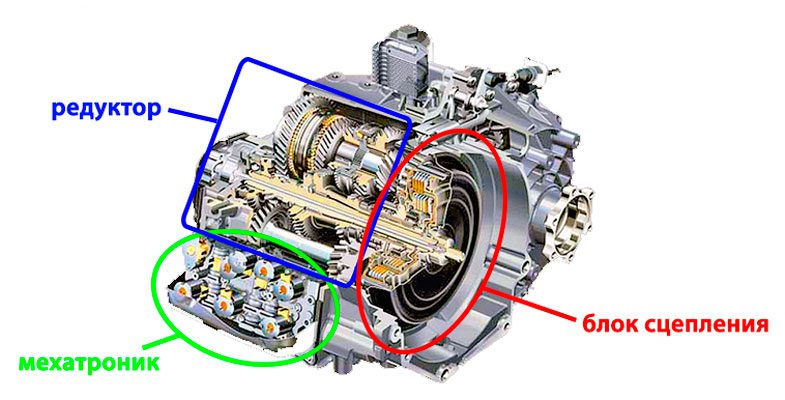
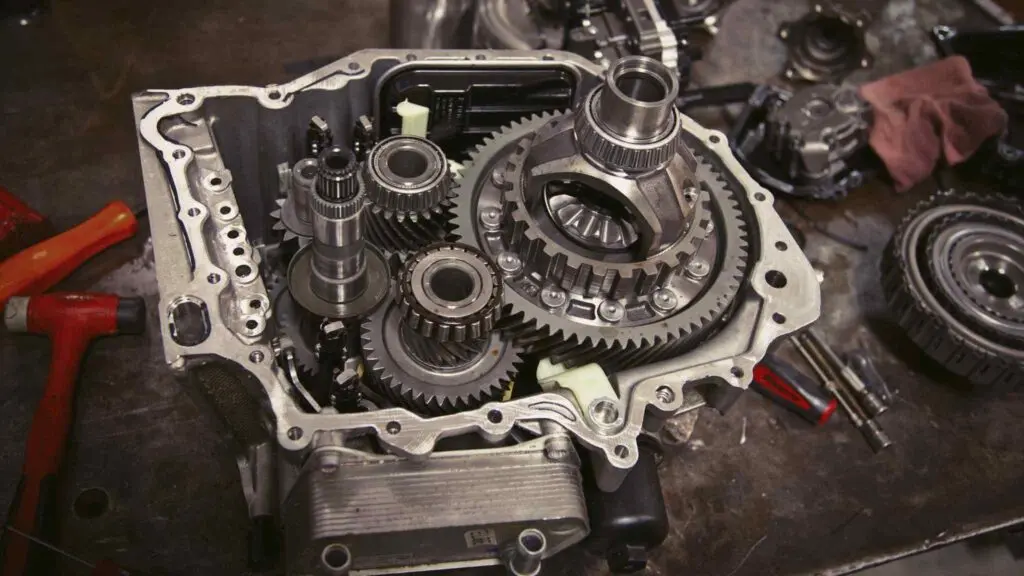
Ռոբոտացված փոխանցումատուփ սարք
Այսօր կան մարդատար ավտոմեքենաների ռոբոտային փոխանցումատուփի մի քանի տեսակներ: Որոշ շարժիչ ուժերով նրանք կարող են տարբերվել միմյանցից, բայց հիմնական մասերը մնում են նույնական:
Ահա փոխանցման տուփի մեջ ներառված հանգույցները.
- Կալանք Կախված արտադրողից և միավորի փոփոխությունից, դա կարող է լինել մի մաս `շփման մակերեսով կամ մի քանի նմանատիպ սկավառակներով: Շատ հաճախ այդ տարրերը տեղակայված են սառեցնող հեղուկում, ինչը կայունացնում է միավորի աշխատանքը `կանխելով դրա գերտաքացումը: Նախընտրական կամ կրկնակի տարբերակը համարվում է ավելի արդյունավետ: Այս փոփոխության ընթացքում, մինչ մեկ հանդերձում ներգրավված է, երկրորդ հավաքածուն պատրաստվում է միացնել հաջորդ արագությունը:
- Հիմնական մասը պայմանական մեխանիկական տուփ է: Յուրաքանչյուր արտադրող օգտագործում է տարբեր գույքային նմուշներ: Օրինակ, Mercedes մակնիշի (Speedshift) ռոբոտը ներքին 7G-Tronic ավտոմատ փոխանցման տուփն է: Միավորների միջև միակ տարբերությունն այն է, որ ոլորող մոմենտի փոխարկիչի փոխարեն օգտագործվում է մի քանի շփման սկավառակներով կալանք: Նման մոտեցում ունի նաև BMW- ն: Նրա SMG փոխանցման տուփը հիմնված է վեց արագությամբ մեխանիկական փոխանցման տուփի վրա:
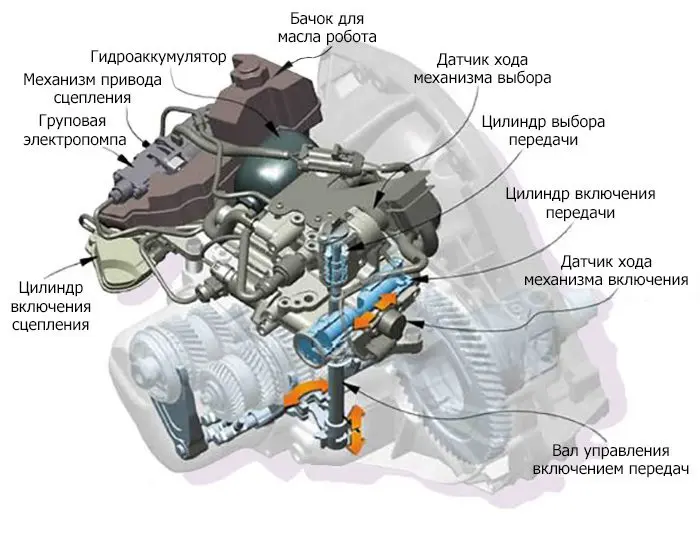
- Կլատչ և փոխանցումատուփ: Կա երկու տարբերակ `էլեկտրական շարժիչով կամ հիդրոմեխանիկական անալոգով: Առաջին դեպքում ճիրանը ճզմվում է էլեկտրական շարժիչով, իսկ երկրորդում `էլեկտրական փականներով հիդրավլիկ բալոններով: Էլեկտրական սկավառակն ավելի դանդաղ է աշխատում, քան հիդրավլիկը, բայց դա չի պահանջում անընդհատ ճնշման պահպանում գծում, որից գործում է էլեկտրահիդրավլիկ տիպը: Հիդրավլիկ ռոբոտը շատ ավելի արագ է տեղափոխվում հաջորդ փուլ (էլեկտրական անալոգի համար 0,05 վայրկյան ՝ 0,5 վայրկյան): Էլեկտրական փոխանցումատուփը հիմնականում տեղադրվում է բյուջետային մեքենաների վրա, իսկ հիդրոմեխանիկական փոխանցումատուփը տեղադրված է պրեմիում սպորտային մեքենաների վրա, քանի որ դրանցում փոխանցման տեմպի արագությունը չափազանց կարևոր է ՝ առանց խափանելու լիսեռի էլեկտրամատակարարումը:

- Ցուցիչ Ռոբոտում շատ նման մասեր կան: Նրանք վերահսկում են փոխանցման տուփի շատ տարբեր պարամետրեր, օրինակ ՝ պատառաքաղների դիրքը, մուտքային և ելքային լիսեռների հեղափոխությունները, որոնց դիրքում կողպված է ընտրիչ անջատիչը, հովացման ջերմաստիճանը և այլն: Այս ամբողջ տեղեկատվությունը սնվում է մեխանիզմի կառավարման սարքին:
- ECU- ն միկրոպրոցեսորային միավոր է, որի մեջ տարբեր ալգորիթմներ են ծրագրավորված սենսորներից եկող տարբեր ցուցանիշներով: Այս միավորը միացված է հիմնական կառավարման միավորին (այնտեղից գալիս են շարժիչի շահագործման վերաբերյալ տվյալները), ինչպես նաև անիվի էլեկտրական կողպման համակարգերին (ABS կամ ESP):
- Գործարկիչներ - հիդրավլիկ բալոններ կամ էլեկտրական շարժիչներ, կախված տուփի փոփոխությունից:
RKPP- ի աշխատանքի առանձնահատկությունները
Որպեսզի մեքենան սահուն սկսվի, վարորդը պետք է ճիշտ օգտագործի կալանքի ոտնակը: Առաջին կամ հետադարձ հանդերձանքը ներառելուց հետո անհրաժեշտ է սահուն ազատել ոտնակը: Երբ վարորդը զգա սկավառակների ներգրավվածության մասին, քանի որ նա ազատում է ոտնակը, նա կարող է RPM- ն ավելացնել շարժիչին, որպեսզի մեքենան չկանգնի: Այսպես է աշխատում մեխանիկան:
Նույնատիպ գործընթաց է տեղի ունենում ռոբոտացված գործընկերոջ մեջ: Միայն այս դեպքում վարորդից մեծ հմտություն չի պահանջվում: Նա միայն անհրաժեշտ է տեղափոխել տուփի անջատիչը համապատասխան դիրքի: Տրանսպորտային միջոցը կսկսի շարժվել `համաձայն կառավարման միավորի պարամետրերի:

Ամենապարզ մեկ կլճակով փոփոխությունը գործում է ճիշտ այնպես, ինչպես դասական մեխանիկան: Սակայն, միևնույն ժամանակ, կա մեկ խնդիր. Էլեկտրոնիկան չի գրանցում կալանքի հետադարձ արձագանքը: Եթե մարդը ի վիճակի է որոշել, թե որքան սահուն է անհրաժեշտ այն դեպքում, որ ոտնակն արձակվի, ապա ավտոմատացումն ավելի կոշտ է գործում, ուստի մեքենայի շարժումն ուղեկցվում է շոշափելի ցնցումներով:
Դա հատկապես զգացվում է մղիչների էլեկտրական շարժիչով կատարված փոփոխություններում. Երբ հանդերձանքը փոխվում է, կալանքը կլինի բաց վիճակում: Դա կնշանակի ոլորող մոմենտի հոսքի դադար, որի պատճառով մեքենան սկսում է դանդաղեցնել: Քանի որ անիվների պտտման արագությունն արդեն ավելի քիչ է համապատասխանում ներգրավված հանդերձանքին, տեղի է ունենում մի փոքր ցնցում:
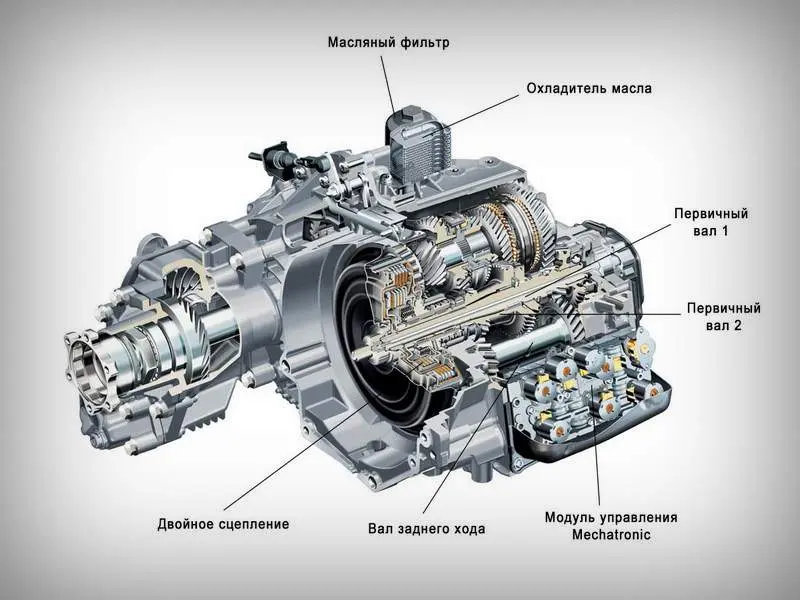
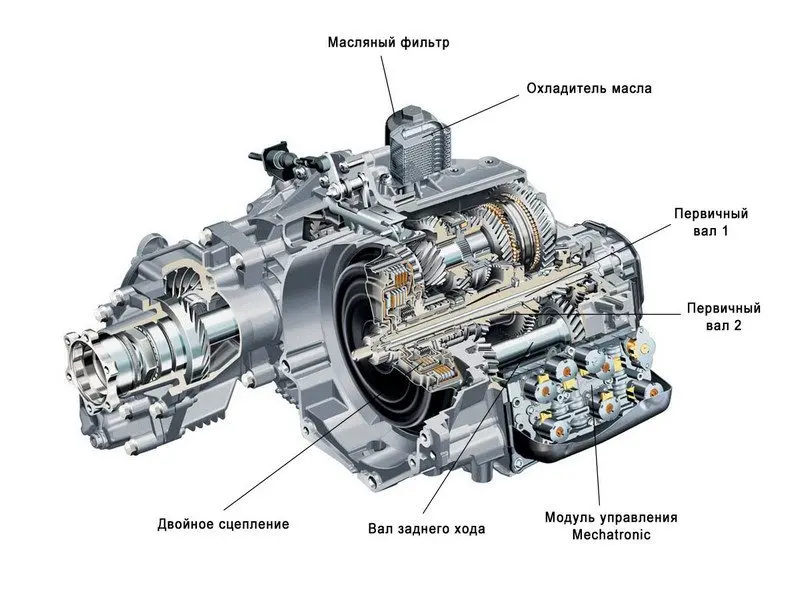
Այս խնդրի նորարարական լուծումը կրկնակի կալանքով փոփոխության մշակումն էր: Նման փոխանցումատուփի վառ ներկայացուցիչը Volkswagen DSG- ն է: Եկեք ավելի սերտ նայենք դրա առանձնահատկություններին:
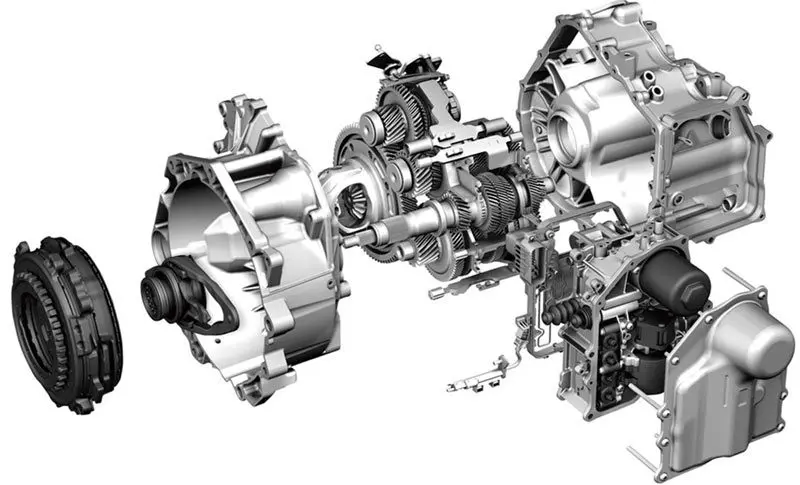
DSG ռոբոտացված փոխանցումատուփի առանձնահատկությունները
Հապավումը նշանակում է ուղղակի հերթափոխի փոխանցումատուփ: Փաստորեն, սրանք երկու մեխանիկական տուփեր են, որոնք տեղադրված են մեկ պատյանում, բայց մեքենայի շասսիի միացման կետով: Յուրաքանչյուր մեխանիզմ ունի իր սեփական կալանքը:
Այս փոփոխության հիմնական առանձնահատկությունը նախընտրական ռեժիմն է: Այսինքն, մինչ առաջին լիսեռը վազում է հանդերձանքի հետ, էլեկտրոնիկան արդեն միացնում է համապատասխան փոխանցումատուփերը (երբ արագացնում են արագությունը բարձրացնելու համար, երբ դանդաղեցնում - իջնում) երկրորդ լիսեռը: Հիմնական մղիչը միայն անհրաժեշտ է անջատել մեկ կալանքը և միացնել մյուսը: Հենց որ կառավարման միավորից ազդանշան է ստացվում `մեկ այլ փուլ անցնելու համար, աշխատանքային կլատչը բացվում է, իսկ երկրորդը` արդեն խառնված փոխանցումներով, անմիջապես միանում է:
Այս դիզայնը թույլ է տալիս մեքենա վարել առանց ուժեղ ցնցումների արագացնելիս: Նախընտրական փոփոխության առաջին զարգացումը հայտնվեց անցյալ դարի 80-ականներին: Իշտ է, այն ժամանակ երկկողմանի կալանքով ռոբոտներ տեղադրվեցին հանրահավաքային և մրցարշավային մեքենաների վրա, որոնցում կարևոր նշանակություն ունեն հանդերձանքի փոխման արագությունն ու ճշտությունը:
Եթե համեմատենք DSG տուփը դասական ավտոմատի հետ, ապա առաջին տարբերակն ավելի շատ առավելություններ ունի: Նախ, հիմնական տարրերի ավելի ծանոթ կառուցվածքի շնորհիվ (արտադրողը հիմք կարող է վերցնել ցանկացած պատրաստի մեխանիկական անալոգ), այդպիսի տուփը վաճառքում ավելի էժան կլինի: Նույն գործոնը ազդում է միավորի պահպանման վրա. Մեխանիկան ավելի հուսալի է և ավելի հեշտ է վերականգնել:
Դա արտադրողին հնարավորություն տվեց նորարարական փոխանցումատուփ տեղադրել իրենց արտադրանքի բյուջետային մոդելների վրա: Երկրորդ, նման փոխանցումատուփ ունեցող տրանսպորտային միջոցների շատ սեփականատերեր նշում են մեքենայի տնտեսության աճը նույնական մոդելի համեմատ, բայց այլ փոխանցումատուփի հետ:
VAG կոնցեռնի ինժեներները մշակել են DSG փոխանցման տուփի երկու տարբերակ: Նրանցից մեկը պիտակավորված է 6-ով, իսկ մյուսը `7-ով, որը համապատասխանում է վանդակում գտնվող քայլերի քանակին: Բացի այդ, վեց աստիճան արագության ավտոմատում օգտագործվում է թաց կալանք, իսկ յոթ արագության անալոգում `չոր կլատչ: Լրացուցիչ մանրամասներ DSG տուփի դրական և բացասական կողմերի մասին, ինչպես նաև այն մասին, թե DSG 6 մոդելը այլ կերպ է տարբերվում յոթերորդ փոփոխությունից, նկարագրված է առանձին հոդված.
Առավելությունները եւ թերությունները
Հաղորդման դիտարկվող տեսակը ունի և՛ դրական, և՛ բացասական կողմեր: Տուփի առավելությունները ներառում են.
- Նման փոխանցումը կարող է օգտագործվել տանդեմում գրեթե ցանկացած էներգիայի էներգաբլոկով:
- Ռոբոտացված տարբերակը համեմատած վարիատորի և ավտոմատ մեքենայի հետ ավելի էժան է, չնայած սա բավականին նորարարական զարգացում է.
- Ռոբոտներն ավելի հուսալի են, քան մյուս ավտոմատ փոխանցումները:
- Մեխանիկայի հետ ներքին նմանության պատճառով ավելի հեշտ է գտնել մասնագետ, որը կզբաղվի միավորի նորոգմամբ:
- Փոխանցման առավել արդյունավետ փոխումը թույլ է տալիս օգտագործել շարժիչի հզորությունը `առանց վառելիքի սպառման կարևոր աճի:
- Արդյունավետությունը բարելավելով ՝ մեքենան արտանետում է ավելի քիչ վնասակար նյութեր շրջակա միջավայր:
Չնայած այլ ավտոմատ փոխանցումների նկատմամբ հստակ առավելություններին, ռոբոտը մի քանի էական թերություններ ունի.
- Եթե մեքենան հագեցած է մեկ սկավառակով ռոբոտով, ապա այդպիսի մեքենայով ուղեւորությունը չի կարելի անվանել հարմարավետ: Փոխանցման տուփը փոխելիս շոշափելի շարժումներ կլինեն, կարծես վարորդը հանկարծակի մեխանիկի վրա նետի կալանքի ոտնակը:
- Շատ հաճախ բլոկում ձախողվում են կալանքը (պակաս սահուն ներգրավումը) և մղիչները: Սա բարդացնում է փոխանցման տուփերի վերականգնումը, քանի որ դրանք ունեն փոքր աշխատանքային ռեսուրս (մոտ 100 հազար կիլոմետր): Հազվագյուտ ծառայությունները վերանորոգվում են, և նոր մեխանիզմը թանկ է:
- Ինչ վերաբերում է կալանքին, ապա սկավառակի ռեսուրսը նույնպես շատ փոքր է ՝ մոտ 60 հազար: Ավելին, ռեսուրսի մոտավորապես կեսում անհրաժեշտ է իրականացնել տուփի «կապը» մասերի շփման մակերեսի պայմանով:
- Եթե մենք խոսում ենք DSG- ի նախընտրական փոփոխության մասին, ապա այն ավելի հուսալի է դարձել `փոխանցման տուփը փոխելու համար քիչ ժամանակ ունենալու պատճառով (դրա շնորհիվ մեքենան այդքան չի դանդաղում): Չնայած դրան, կպչունությունը նրանց մեջ դեռ տառապում է:
Հաշվի առնելով թվարկված գործոնները ՝ կարելի է եզրակացնել, որ ինչ վերաբերում է հուսալիությանը և աշխատանքային կյանքին, մեխանիկան դեռ հավասար չէ: Եթե շեշտը դրվում է առավելագույն հարմարավետության վրա, ապա ավելի լավ է ընտրել փոփոխիչ (որն է դրա առանձնահատկությունը, կարդացեք) այստեղ) Պետք է հիշել, որ այդպիսի փոխանցումը հնարավորություն չի տալիս վառելիք խնայել:
Ամփոփելով, մենք առաջարկում ենք կարճ տեսանյութերի համեմատություն փոխանցումների հիմնական տեսակների `դրանց կողմ և դեմ կողմերի մասին.

Հարցեր եւ պատասխաններ:
Ո՞րն է տարբերությունը ավտոմատի և ռոբոտի միջև: Ավտոմատ փոխանցման տուփն աշխատում է ոլորող մոմենտ փոխարկիչի հաշվին (ճանավակի հետ ճարմանդով կոշտ միացում չկա), իսկ ռոբոտը մեխանիկայի անալոգային է, միայն արագությունները փոխվում են ավտոմատ կերպով։
Ինչպե՞ս փոխել փոխանցումները ռոբոտի տուփի վրա: Ռոբոտը վարելու սկզբունքը նույնական է ավտոմատ մեքենա վարելուն. ընտրիչի վրա ընտրվում է ցանկալի ռեժիմը, իսկ շարժիչի արագությունը կարգավորվում է գազի ոտնակով: Արագությունները կանցնեն ինքնուրույն:
Քանի՞ ոտնակ կա ռոբոտով մեքենայում: Թեև ռոբոտը կառուցվածքով նման է մեխանիկին, ճարմանդը ավտոմատ կերպով անջատվում է թռչող անիվից, ուստի ռոբոտային փոխանցումատուփով մեքենան ունի երկու ոտնակ (գազ և արգելակ):
Ինչպե՞ս ճիշտ կայանել մեքենան ռոբոտի տուփով: Եվրոպական մոդելը պետք է կայանված լինի A ռեժիմում կամ հետընթաց փոխանցումով: Եթե մեքենան ամերիկյան է, ապա սելեկտորի վրա կա P ռեժիմ։
Մեկ մեկնաբանություն
Դավիթ
Բարև ձեզ օգնության կարիք ունեմ, 203 կուպե անցավ վթարային ռեժիմ, ինչ կարող եմ անել: