Շնչափող
Պարունակություն
Ժամանակակից մեքենաներում էլեկտրակայանը աշխատում է երկու համակարգով՝ ներարկման և ընդունման: Դրանցից առաջինը պատասխանատու է վառելիքի մատակարարման համար, երկրորդի խնդիրն է ապահովել օդի հոսքը դեպի բալոններ։
Նպատակը, հիմնական կառուցվածքային տարրերը
Չնայած այն հանգամանքին, որ ամբողջ համակարգը «վերահսկում է» օդի մատակարարումը, այն կառուցվածքային առումով շատ պարզ է, և դրա հիմնական տարրը շնչափող սարքն է (շատերն այն անվանում են հնաոճ շնչափող): Եվ նույնիսկ այս տարրը ունի պարզ դիզայն:
Շնչափող փականի աշխատանքի սկզբունքը նույնն է մնացել կարբյուրացված շարժիչների ժամանակներից: Այն արգելափակում է հիմնական օդային ալիքը՝ դրանով իսկ կարգավորելով բալոններին մատակարարվող օդի քանակը։ Բայց եթե ավելի վաղ այս կափույրը կարբյուրատորի դիզայնի մի մասն էր, ապա ներարկման շարժիչների վրա այն ամբողջովին առանձին միավոր է:
Սառույցի մատակարարման համակարգ
Ի լրումն հիմնական խնդիրի՝ օդի չափաբաժինը ցանկացած ռեժիմում էներգաբլոկի բնականոն աշխատանքի համար, այս կափույրը նաև պատասխանատու է ծնկաձև լիսեռի (XX) պահանջվող պարապ արագության պահպանման համար և շարժիչի տարբեր բեռների տակ: Նա նաև ներգրավված է արգելակման ուժեղացուցիչի շահագործման մեջ:
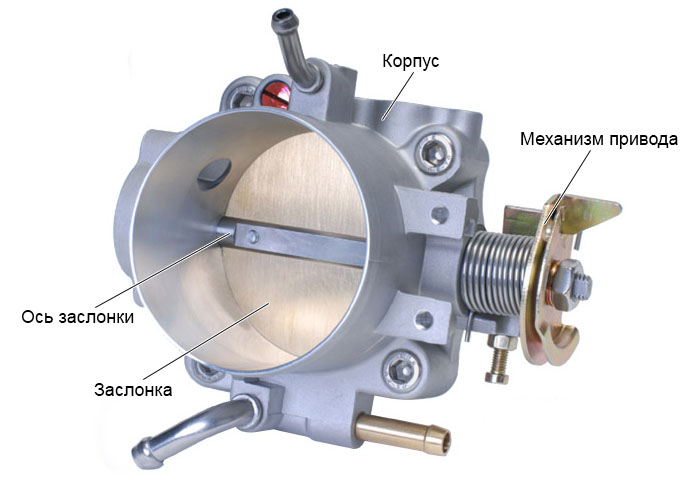
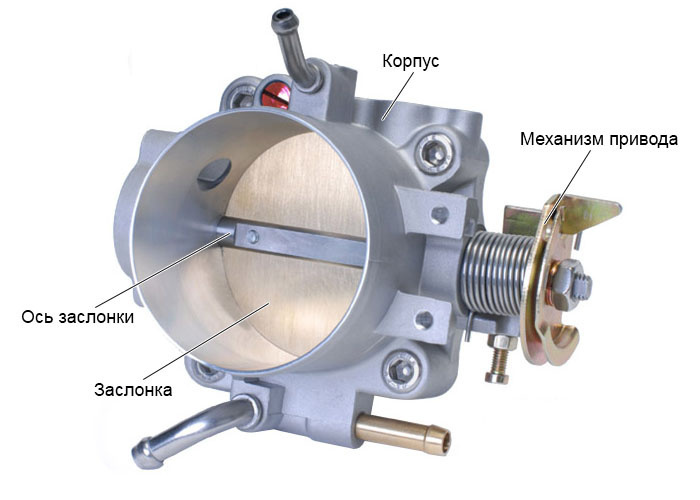
Շնչափողի մարմինը շատ պարզ է: Հիմնական կառուցվածքային տարրերն են.
- Рамки
- կափույր լիսեռով
- Շարժիչ մեխանիզմ
Մեխանիկական շնչափող հավաքում
Տարբեր տեսակի խեղդուկները կարող են ներառել նաև մի շարք լրացուցիչ տարրեր՝ սենսորներ, շրջանցող ալիքներ, ջեռուցման ալիքներ և այլն։ Ավելի մանրամասն, մեքենաներում օգտագործվող շնչափող փականների նախագծման առանձնահատկությունները, մենք կքննարկենք ստորև:
Շնչափող փականը տեղադրված է ֆիլտրի տարրի և շարժիչի կոլեկտորի միջև ընկած օդային միջանցքում: Այս հանգույցին հասանելիությունը ոչ մի կերպ դժվար չէ, ուստի սպասարկման աշխատանքներ կատարելիս կամ այն փոխարինելիս դժվար չի լինի հասնել դրան և ապամոնտաժել այն մեքենայից:
Հանգույցների տեսակները
Ինչպես արդեն նշվեց, արագացուցիչների տարբեր տեսակներ կան: Ընդհանուր առմամբ երեքն են.
- Մեխանիկական շարժիչ
- Էլեկտրամեխանիկական
- Էլեկտրոնային
Հենց այս կարգով էլ մշակվել է ընդունման համակարգի այս տարրի դիզայնը: Առկա տեսակներից յուրաքանչյուրն ունի իր դիզայնի առանձնահատկությունները: Հատկանշական է, որ տեխնոլոգիայի զարգացման հետ մեկտեղ հանգույցային սարքը ոչ թե բարդացավ, այլ, ընդհակառակը, դարձավ ավելի պարզ, բայց որոշ նրբերանգներով։
Փեղկ մեխանիկական շարժիչով: Դիզայն, առանձնահատկություններ
Սկսենք մեխանիկական շարժիչով կափույրից: Այս տեսակի մասերը հայտնվել են մեքենաների վրա վառելիքի ներարկման համակարգի տեղադրման սկզբից։ Դրա հիմնական առանձնահատկությունն այն է, որ վարորդը ինքնուրույն կառավարում է կափույրը փոխանցման մալուխի միջոցով, որը միացնում է արագացուցիչի ոտնակը կափույրի լիսեռին միացված գազի հատվածին:
Նման միավորի դիզայնը ամբողջությամբ փոխառված է կարբյուրատորային համակարգից, միակ տարբերությունն այն է, որ ցնցող կլանիչը առանձին տարր է:
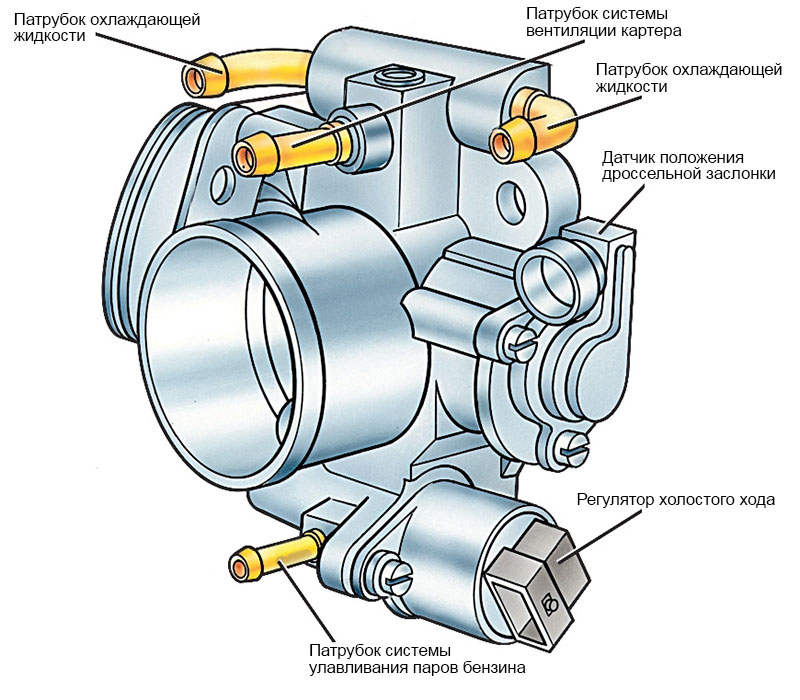
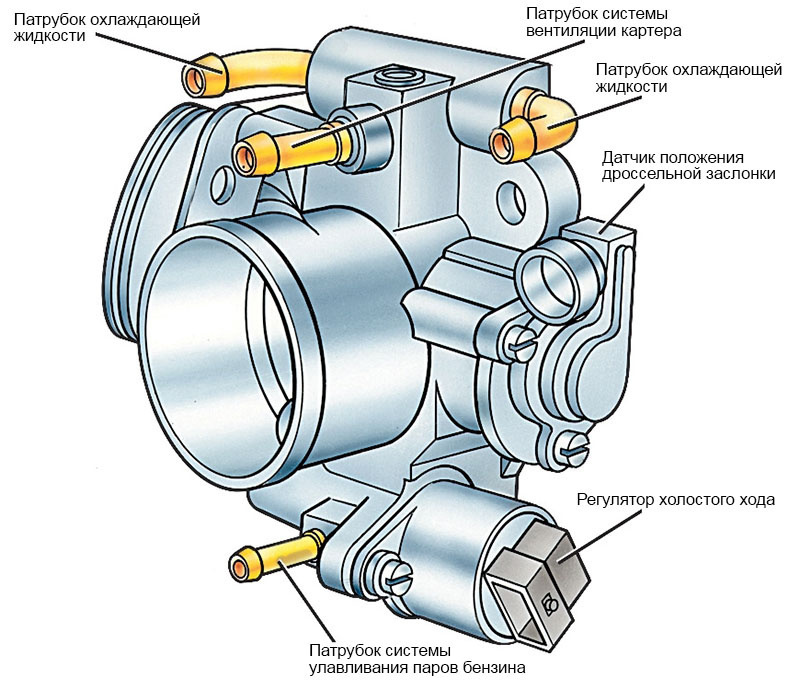
Այս միավորի դիզայնը լրացուցիչ ներառում է դիրքի սենսոր (հարվածման կլանիչի բացման անկյուն), անգործության արագության կարգավորիչ (XX), շրջանցող ալիքներ և ջեռուցման համակարգ:
Շնչափողի հավաքում մեխանիկական շարժիչով
Ընդհանուր առմամբ, շնչափողի դիրքի սենսորը առկա է բոլոր տեսակի հանգույցներում: Դրա գործառույթն է որոշել բացման անկյունը, որը թույլ է տալիս էլեկտրոնային ներարկիչի կառավարման միավորին որոշել այրման խցիկներին մատակարարվող օդի քանակը և դրա հիման վրա կարգավորել վառելիքի մատակարարումը:
Նախկինում օգտագործվում էր պոտենցիոմետրիկ տիպի սենսոր, որի բացման անկյունը որոշվում էր դիմադրության փոփոխությամբ։ Ներկայումս լայնորեն կիրառվում են մագնիսական դիմադրողական սենսորները, որոնք ավելի հուսալի են, քանի որ չունեն մաշվածության ենթակա զույգ կոնտակտներ։
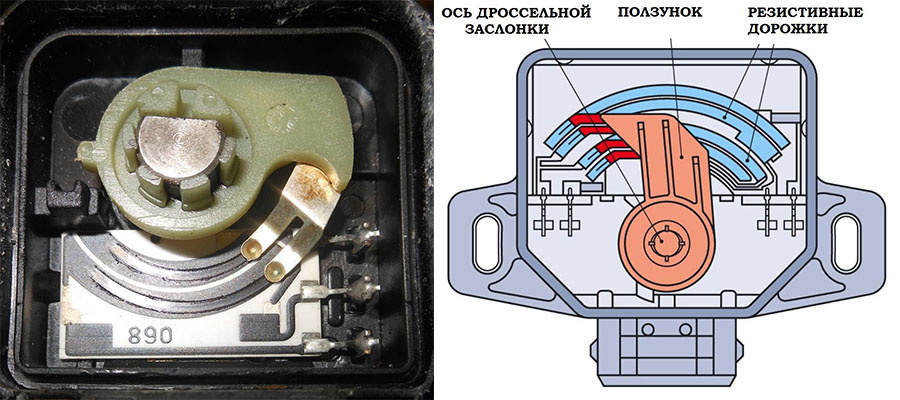
Շնչափողի դիրքի ցուցիչի պոտենցիոմետրիկ տեսակը
Մեխանիկական խեղդուկների XX կարգավորիչը առանձին ալիք է, որը շունտավորում է հիմնականը: Այս ալիքը հագեցած է էլեկտրամագնիսական փականով, որը կարգավորում է օդի հոսքը՝ կախված պարապ վիճակում շարժիչի պայմաններից:
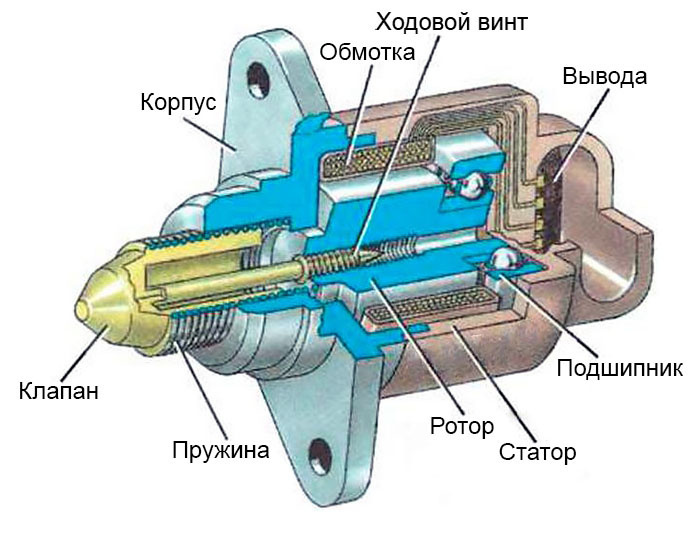
Անգործուն կառավարման սարք
Նրա աշխատանքի էությունը հետևյալն է՝ քսաներորդում շոկի կլանիչը ամբողջովին փակ է, բայց օդը անհրաժեշտ է շարժիչի աշխատանքի համար և մատակարարվում է առանձին ալիքով։ Այս դեպքում ECU-ն որոշում է ծնկաձև լիսեռի արագությունը, որի հիման վրա կարգավորում է էլեկտրամագնիսական փականի կողմից այս ալիքի բացման աստիճանը՝ սահմանված արագությունը պահպանելու համար:
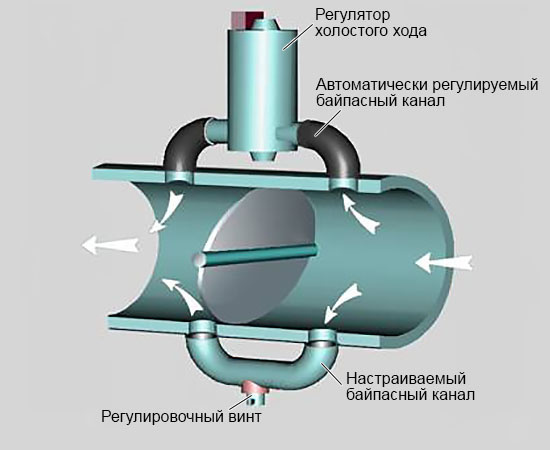
Շրջանցող ալիքներն աշխատում են նույն սկզբունքով, ինչ կարգավորիչը: Բայց նրա խնդիրն է պահպանել էլեկտրակայանի արագությունը՝ հանգստի ժամանակ բեռ ստեղծելով։ Օրինակ, կլիմայի կառավարման համակարգը միացնելը մեծացնում է բեռը շարժիչի վրա, ինչի հետևանքով արագությունը նվազում է: Եթե կարգավորիչը չի կարող անհրաժեշտ քանակությամբ օդ մատակարարել շարժիչին, ապա շրջանցման ալիքները միացված են:
Բայց այս լրացուցիչ ալիքներն ունեն զգալի թերություն՝ դրանց խաչմերուկը փոքր է, ինչի պատճառով դրանք կարող են խցանվել և սառչել։ Վերջինիս դեմ պայքարելու համար շնչափող փականը միացված է հովացման համակարգին։ Այսինքն, հովացուցիչ նյութը շրջանառվում է պատյանների ալիքներով, տաքացնելով ալիքները:
Կապուղիների համակարգչային մոդելը թիթեռային փականում
Շնչափողի մեխանիկական հավաքման հիմնական թերությունը օդ-վառելիքի խառնուրդի պատրաստման սխալի առկայությունն է, որն ազդում է շարժիչի արդյունավետության և հզորության վրա: Դա պայմանավորված է նրանով, որ ECU-ն չի վերահսկում կափույրը, այն ստանում է միայն բացման անկյան մասին տեղեկատվություն: Հետևաբար, շնչափող փականի դիրքի հանկարծակի փոփոխություններով, կառավարման միավորը միշտ չէ, որ ժամանակ է ունենում «հարմարվելու» փոփոխված պայմաններին, ինչը հանգեցնում է վառելիքի չափազանց մեծ սպառման:
Էլեկտրամեխանիկական թիթեռի փական
Թիթեռային փականների զարգացման հաջորդ փուլը էլեկտրամեխանիկական տիպի առաջացումն էր: Կառավարման մեխանիզմը մնացել է նույնը՝ մալուխը։ Բայց այս հանգույցում լրացուցիչ ալիքներ չկան, քանի որ ավելորդ է: Փոխարենը նախագծում ավելացվել է էլեկտրոնային մասնակի մարման մեխանիզմ, որը վերահսկվում է ECU-ի կողմից:
Կառուցվածքային առումով այս մեխանիզմը ներառում է փոխանցման տուփով պայմանական էլեկտրական շարժիչ, որը միացված է շոկի կլանիչի լիսեռին:

Այս ագրեգատն աշխատում է այսպես. շարժիչը գործարկելուց հետո կառավարման միավորը հաշվարկում է մատակարարվող օդի քանակը և բացում է կափույրը ցանկալի անկյան տակ՝ պահանջվող պարապ արագությունը սահմանելու համար: Այսինքն, այս տիպի ստորաբաժանումներում կառավարման միավորը հնարավորություն ուներ կարգավորելու շարժիչի աշխատանքը պարապ վիճակում: Էլեկտրակայանի այլ աշխատանքային ռեժիմներում վարորդն ինքն է կառավարում շնչափողը:
Մասնակի հսկողության մեխանիզմի օգտագործումը հնարավորություն տվեց պարզեցնել արագացուցիչի միավորի դիզայնը, բայց չվերացրեց հիմնական թերությունը՝ խառնուրդի ձևավորման սխալները: Այս դիզայնում խոսքը ոչ թե կափույրի մասին է, այլ միայն պարապ վիճակում:
Էլեկտրոնային կափույր
Վերջին տեսակը՝ էլեկտրոնայինը, գնալով ավելի է ներմուծվում մեքենաների մեջ։ Դրա հիմնական առանձնահատկությունն այն է, որ արագացուցիչի ոտնակի ուղղակի փոխազդեցության բացակայությունը կափույրի լիսեռի հետ: Այս դիզայնի կառավարման մեխանիզմն արդեն լիովին էլեկտրական է: Այն դեռ օգտագործում է նույն էլեկտրական շարժիչը, որի փոխանցումատուփը միացված է ECU կառավարվող լիսեռին: Բայց կառավարման միավորը «վերահսկում է» դարպասի բացումը բոլոր ռեժիմներում: Դիզայնին ավելացվել է լրացուցիչ սենսոր՝ գազի ոտնակի դիրքը։
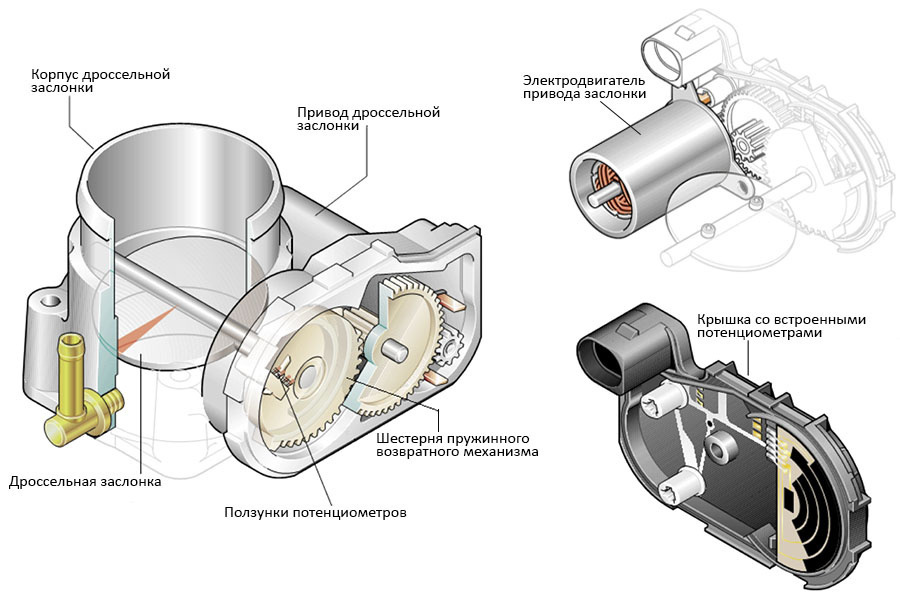
Էլեկտրոնային շնչափող տարրեր
Գործողության ընթացքում կառավարման միավորը օգտագործում է տեղեկատվություն ոչ միայն ցնցող կլանիչի դիրքի սենսորներից և արագացուցիչի ոտնակից: Նաև հաշվի են առնվում ավտոմատ փոխանցման մոնիտորինգի սարքերի, արգելակման համակարգերի, կլիմայի կառավարման սարքավորումների և նավարկության կառավարման ազդանշանները:
Սենսորներից ստացվող ամբողջ տեղեկատվությունը մշակվում է միավորի կողմից և դրա հիման վրա սահմանվում է դարպասի բացման օպտիմալ անկյունը: Այսինքն՝ էլեկտրոնային համակարգը լիովին վերահսկում է ընդունման համակարգի աշխատանքը։ Սա հնարավորություն տվեց վերացնել խառնուրդի առաջացման սխալները: Էլեկտրակայանի աշխատանքի ցանկացած ռեժիմում բալոններին օդի ճշգրիտ քանակություն կմատակարարվի:

Բայց այս համակարգը զերծ չէր թերություններից. Դրանք նաև մի փոքր ավելի շատ են, քան մյուս երկու տեսակների մեջ: Դրանցից առաջինն այն է, որ կափույրը բացվում է էլեկտրական շարժիչով: Փոխանցման ագրեգատների ցանկացած, նույնիսկ աննշան անսարքությունը հանգեցնում է միավորի անսարքության, ինչը ազդում է շարժիչի աշխատանքի վրա: Մալուխի կառավարման մեխանիզմներում նման խնդիր չկա։
Երկրորդ թերությունն ավելի էական է, բայց այն հիմնականում վերաբերում է բյուջետային մեքենաներին։ Եվ ամեն ինչ հիմնված է այն բանի վրա, որ ոչ այնքան զարգացած ծրագրային ապահովման պատճառով շնչափողը կարող է ուշ աշխատել։ Այսինքն՝ արագացուցիչի ոտնակը սեղմելուց հետո ECU-ն որոշակի ժամանակ է պահանջում տեղեկատվության հավաքագրման և մշակման համար, որից հետո ազդանշան է ուղարկում շնչափողի կառավարման շարժիչին։
Էլեկտրոնային շնչափողը սեղմելուց մինչև շարժիչի արձագանքման հետաձգման հիմնական պատճառը ավելի էժան էլեկտրոնիկան և ոչ օպտիմալացված ծրագրակազմն է:
Նորմալ պայմաններում այս թերությունն առանձնապես նկատելի չէ, սակայն որոշակի պայմաններում նման աշխատանքը կարող է հանգեցնել տհաճ հետևանքների։ Օրինակ՝ ճանապարհի սայթաքուն հատվածից մեկնարկելիս երբեմն անհրաժեշտ է լինում արագ փոխել շարժիչի աշխատանքի ռեժիմը («ոտնակ նվագել»), այսինքն՝ նման պայմաններում անհրաժեշտ է արագ «արձագանքել»։ շարժիչը վարորդի գործողությունների համար կարևոր է: Արագացուցիչի աշխատանքի առկա ուշացումը կարող է հանգեցնել վարելու բարդության, քանի որ վարորդը չի «զգում» շարժիչը։
Մեքենաների որոշ մոդելների էլեկտրոնային շնչափողի մեկ այլ առանձնահատկություն, որը շատերի համար թերություն է, գազի շարժիչի հատուկ կարգավորումն է գործարանում: ECU-ն ունի կարգավորում, որը բացառում է անիվի սայթաքման հնարավորությունը մեկնարկի ժամանակ: Դա ձեռք է բերվում նրանով, որ շարժման սկզբում միավորը հատուկ չի բացում կափույրը առավելագույն հզորության, փաստորեն, ECU-ն «խեղդում է» շարժիչը շնչափողով: Որոշ դեպքերում այս հատկանիշը բացասաբար է ազդում:
Պրեմիում մեքենաներում խնդիրներ չկան մուտքի համակարգի «արձագանքման» հետ կապված նորմալ ծրագրային ապահովման մշակման հետ: Նաև նման մեքենաներում հաճախ հնարավոր է սահմանել էլեկտրակայանի շահագործման ռեժիմը՝ ըստ նախասիրությունների։ Օրինակ, «սպորտային» ռեժիմում վերակազմավորվում է նաև ընդունման համակարգի աշխատանքը, որի դեպքում ECU-ն գործարկման պահին այլևս չի «խեղդում» շարժիչը, ինչը թույլ է տալիս մեքենային «արագ» շարժվել: