Էլեկտրոնային բռնկման համակարգ
Պարունակություն
- Ինչ է էլեկտրոնային բռնկման համակարգը
- Էլեկտրոնային բռնկման համակարգի արժեքը
- Ներարկման շարժիչի բռնկման համակարգի կազմը
- Էլեկտրոնային բռնկման համակարգի շահագործման սկզբունքը
- Էլեկտրոնային բռնկման համակարգի տեսակները
- Էլեկտրոնային բռնկման անսարքությունները
- Էլեկտրոնային բռնկման համակարգերի առավելությունները
- Տեսանյութ թեմայի վերաբերյալ
- Հարցեր եւ պատասխաններ:
Մեքենան շատ բարդ համակարգ է, նույնիսկ եթե մենք բախվում ենք հին դասականի հետ: Տրանսպորտային միջոցը պարունակում է մեծ թվով մեխանիզմներ, հավաքույթներ և համակարգեր, որոնք փոխազդելով միմյանց հետ, թույլ են տալիս աշխատանքներ իրականացնել ապրանքների և ուղևորների տեղափոխման ուղղությամբ:
Մեքենայի դինամիկան ապահովող առանցքային միավորը շարժիչն է: Բենզինով աշխատող ներքին այրման շարժիչը, անկախ տրանսպորտային միջոցի տեսակից, նույնիսկ եթե դա սկուտեր է, հագեցած կլինի բռնկման համակարգով: Դիզելային բլոկի շահագործման սկզբունքը տարբերվում է նրանով, որ բալոնում VTS- ն վառվում է բարձր սեղմումից տաքացված օդի մասում դիզելային վառելիքի ներարկման արդյունքում: Կարդացեք այն մասին, թե որ շարժիչն է ավելի լավ: մեկ այլ ակնարկում.
Այժմ մենք ավելի շատ կենտրոնանալու ենք բռնկման համակարգի վրա: ICE կարբյուրատորը հագեցած կլինի Կապ կամ անկապ փոփոխություն... Արդեն կան առանձին հոդվածներ դրանց կառուցվածքի և տարբերության մասին: Էլեկտրոնիկայի զարգացման և մեքենաների մեջ դրա աստիճանական ներդրման շնորհիվ ժամանակակից մեքենան ստացել է վառելիքի ավելի կատարելագործված համակարգ (կարդացեք ներարկման համակարգերի տեսակների մասին այստեղ), ինչպես նաև բարելավված բռնկման համակարգ:

Հաշվի առեք, թե ինչ է էլեկտրոնային բռնկման համակարգը, ինչպես է այն աշխատում, դրա կարևորությունը օդային վառելիքի խառնուրդի բռնկման և մեքենայի դինամիկայի մեջ: Տեսնենք նաև, թե որոնք են այս զարգացման թերությունները:
Ինչ է էլեկտրոնային բռնկման համակարգը
Եթե շփման և ոչ կոնտակտային համակարգերում կայծի ստեղծումն ու բաշխումը կատարվում է մեխանիկական և մասամբ էլեկտրոնային եղանակով, ապա այս SZ- ն բացառապես էլեկտրոնային տեսակի է: Չնայած նախորդ համակարգերը նույնպես մասամբ օգտագործում են էլեկտրոնային սարքեր, դրանք ունեն մեխանիկական տարրեր:
Օրինակ, կոնտակտային SZ- ն օգտագործում է մեխանիկական ազդանշանային խանգարիչ, որն ակտիվացնում է պարույրում ցածր լարման հոսանքի անջատումը և բարձր լարման զարկերակի առաջացումը: Այն պարունակում է նաև դիստրիբյուտոր, որն աշխատում է `փակելով համապատասխան կայծի կոնտակտները` օգտագործելով պտտվող սահող: Անկապ համակարգում մեխանիկական անջատիչը փոխարինվեց դիստրիբյուտորում տեղադրված Hall ցուցիչով, որն ունի նմանատիպ կառուցվածք, ինչպես նախորդ համակարգում (դրա կառուցվածքի և գործունեության սկզբունքի մասին լրացուցիչ տեղեկությունների համար կարդացեք առանձին վերանայում).
SZ- ի միկրոպրոցեսորային հիմքով տեսակը նույնպես համարվում է անպաշտպան, բայց խառնաշփոթ չստեղծելու համար այն կոչվում է էլեկտրոնային: Այս փոփոխության մեջ մեխանիկական տարրեր չկան, չնայած այն նաև շարունակում է ամրագրել ծնկաձեւ լիսեռի ռոտացիայի արագությունը ՝ որոշելու այն պահը, երբ անհրաժեշտ է կայծեր մատակարարել կայծերին:

Modernամանակակից մեքենաներում այս SZ- ն բաղկացած է մի քանի կարևոր տարրերից, որոնց աշխատանքը հիմնված է տարբեր արժեքների էլեկտրական ազդակների ստեղծման և բաշխման վրա: Դրանք համաժամացնելու համար կան հատուկ սենսորներ, որոնք առկա չեն համակարգի նախորդ փոփոխություններում: Այս տվիչներից մեկը DPKV- ն է, որի մասին կա առանձին մանրամասն հոդված.
Հաճախ էլեկտրոնային բռնկումը անքակտելիորեն կապված է այլ համակարգերի աշխատանքի հետ, օրինակ `վառելիքի, արտանետման և հովացման: Բոլոր գործընթացները վերահսկվում են ECU (էլեկտրոնային կառավարման միավոր) կողմից: Այս միկրոպրոցեսորը ծրագրավորված է գործարանում ՝ որոշակի մեքենայի պարամետրերի համար: Եթե ծրագրաշարում կամ մղիչում տեղի է ունենում խափանում, կառավարման միավորը շտկում է այս անսարքությունը և համապատասխան ծանուցում է վահանակին (առավել հաճախ դա շարժիչի պատկերակն է կամ Ստուգիչ շարժիչի գրությունը):
Որոշ խնդիրներ վերացվում են համակարգչային ախտորոշման գործընթացում հայտնաբերված սխալները վերականգնելու միջոցով: Կարդացեք, թե ինչպես է անցնում այս ընթացակարգը: այստեղ... Որոշ մեքենաներում առկա է ինքնորոշման ստանդարտ տարբերակ, որը թույլ է տալիս որոշել, թե կոնկրետ ինչ խնդիր է, և արդյո՞ք հնարավոր է ինքնուրույն շտկել այն: Դա անելու համար հարկավոր է զանգահարել բեռնատար համակարգի համապատասխան ընտրացանկը: Այն ասում է, թե ինչպես կարելի է դա անել որոշ մեքենաներում առանձին.
Էլեկտրոնային բռնկման համակարգի արժեքը
Ignանկացած բռնկման համակարգի խնդիրը պարզապես օդի և բենզինի խառնուրդի բռնկումը չէ: Դրա սարքը պետք է ներառի մի քանի մեխանիզմներ, որոնք որոշում են ամենաարդյունավետ պահը, երբ ավելի լավ կլինի դա անել:
Եթե էներգաբլոկը գործում էր միայն մեկ ռեժիմով, առավելագույն արդյունավետությունը ցանկացած պահի կարող էր հանվել: Բայց այս կարգի գործելակերպը անիրագործելի է: Օրինակ, շարժիչը պարապուրդի համար բարձր պտույտների կարիք չունի: Մյուս կողմից, երբ մեքենան բեռնված է կամ արագություն է հավաքում, դրա համար անհրաժեշտ է ուժեղացված դինամիկա: Իհարկե, դրան կարելի էր հասնել փոխանցման տուփի միջոցով ՝ մեծ թվով արագություններով, ներառյալ ցածր և բարձր արագությամբ: Այնուամենայնիվ, նման մեխանիզմը չափազանց բարդ կլինի ոչ միայն օգտագործելու, այլ նաև պահպանելու համար:
Բացի այս անհարմարություններից, շարժիչի կայուն արագությունը թույլ չի տա արտադրողներին արտադրել ճարպիկ, հզոր և միևնույն ժամանակ տնտեսական մեքենաներ: Այս պատճառներից ելնելով, նույնիսկ հասարակ էներգաբլոկները հագեցած են ջրառի համակարգով, որը վարորդին հնարավորություն կտա ինքնուրույն որոշել, թե ինչ հատկություններ պետք է ունենա իր մեքենան տվյալ դեպքում: Եթե նրան անհրաժեշտ է դանդաղ քշել, օրինակ ՝ խցանման մեջ մեքենայով բարձրանալ դեպի իր դիմաց գտնվող մեքենան, ապա նա իջեցնում է շարժիչի արագությունը: Բայց արագ արագացման համար, օրինակ, երկար բարձրանալուց առաջ կամ առաջ անցնելիս, վարորդին անհրաժեշտ է բարձրացնել շարժիչի արագությունը:

Այս ռեժիմների փոփոխման խնդիրը կապված է օդի-վառելիքի խառնուրդի այրման առանձնահատկության հետ: Ստանդարտ իրավիճակում, երբ շարժիչը բեռնված չէ, և մեքենան կանգ է առնում, BTC- ն լույս է տալիս կայծից առաջացած կայծից այն պահին, երբ մխոցը հասնում է վերին մեռյալ կենտրոն ՝ կատարելով սեղմման հարված (բոլոր հարվածների համար 4-հարվածանոց և 2-հարվածանոց շարժիչի, կարդա մեկ այլ ակնարկում) Բայց երբ շարժիչը բեռ է դնում, օրինակ, մեքենան սկսում է շարժվել, խառնուրդը պետք է սկսի բռնկվել մխոցի կամ միլիվայրկյան TDC- ի վրա ավելի ուշ:
Երբ արագությունը բարձրանում է, իներցիոն ուժի պատճառով, մխոցն ավելի արագ է անցնում հղման կետը, ինչը հանգեցնում է վառելիք-օդի խառնուրդի չափազանց ուշ բռնկմանը: Այդ պատճառով կայծը պետք է նախաձեռնել մի քանի միլիվայրկյան շուտ: Այս ազդեցությունը կոչվում է բռնկման ժամանակացույց: Այս պարամետրը վերահսկելը բռնկման համակարգի մեկ այլ գործառույթ է:
Այդ նպատակով առաջին մեքենաներում տրանսպորտային խցիկում կար հատուկ լծակ, որի շարժման միջոցով վարորդը ինքնուրույն փոխեց այս UOZ- ն ՝ կախված իրավիճակից: Այս գործընթացն ավտոմատացնելու համար շփման բռնկման համակարգին ավելացվեց երկու կարգավորիչ `վակուումային և կենտրոնախույս: Նույն տարրերը տեղափոխվել են ավելի առաջադեմ BSZ:
Քանի որ յուրաքանչյուր բաղադրիչ կատարում էր միայն մեխանիկական ճշգրտումներ, դրանց արդյունավետությունը սահմանափակ էր: Միավորի ավելի ճշգրիտ ճշգրտումը ցանկալի ռեժիմին հնարավոր է միայն էլեկտրոնիկայի շնորհիվ: Այս գործողությունը ամբողջությամբ վերագրվում է կառավարման միավորին:
Հասկանալու համար, թե ինչպես է աշխատում միկրոպրոցեսորի վրա հիմնված SZ- ն, նախ անհրաժեշտ է հասկանալ դրա սարքը:
Ներարկման շարժիչի բռնկման համակարգի կազմը
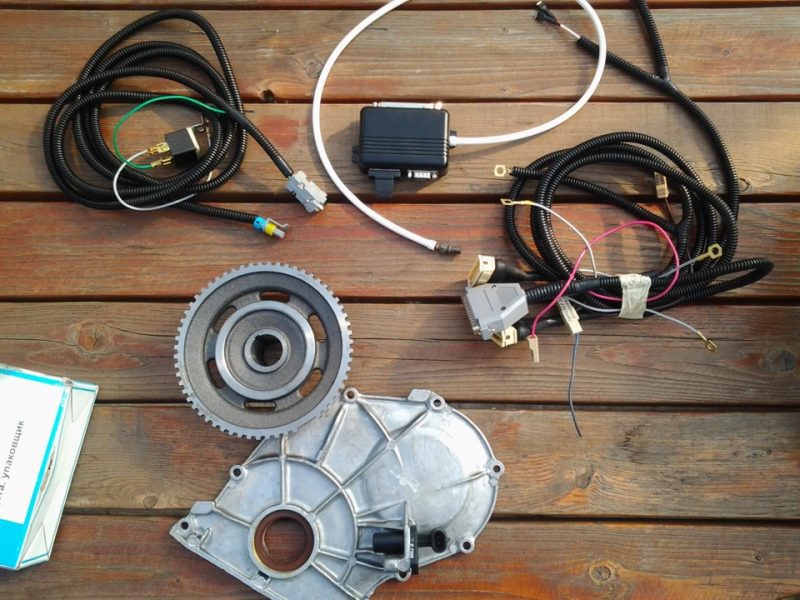
Ներարկման շարժիչը օգտագործում է էլեկտրոնային բոցավառում, որը բաղկացած է.
- վերահսկիչ;
- ծնկաձև լիսեռի դիրքի սենսոր (DPKV);
- Օղակաձև հանդերձանքով ճախարակ (բարձր լարման իմպուլսի ձևավորման պահը որոշելու համար);
- Բոցավառման մոդուլ;
- Բարձր լարման լարեր;
- Մոմեր

Եկեք մեկ առ մեկ նայենք հիմնական տարրերին:
Բոցավառման մոդուլ
Բոցավառման մոդուլը բաղկացած է երկու բոցավառման պարույրներից և երկու բարձր լարման անջատիչներից: Բոցավառման կծիկները կատարում են ցածր լարման հոսանքը բարձր լարման իմպուլսի վերածելու գործառույթը։ Այս գործընթացը տեղի է ունենում առաջնային ոլորուն կտրուկ անջատման պատճառով, որի պատճառով բարձր լարման հոսանք է առաջանում մոտակա երկրորդական ոլորունում:
Բարձր լարման իմպուլսը անհրաժեշտ է կայծային մոմերին բավականաչափ էլեկտրական լիցքաթափում ապահովելու համար՝ օդ/վառելիքի խառնուրդը բռնկելու համար: Անջատիչն անհրաժեշտ է բռնկման կծիկի առաջնային ոլորուն ճիշտ ժամանակին միացնելու և անջատելու համար:
Այս մոդուլի շահագործման ժամանակի վրա ազդում է շարժիչի արագությունը: Այս պարամետրի հիման վրա վերահսկիչը որոշում է բռնկման կծիկի ոլորուն միացնելու / անջատելու արագությունը:
Բարձր լարման բռնկման լարեր
Ինչպես ցույց է տալիս այս տարրերի անվանումը, դրանք նախատեսված են բռնկման մոդուլից բարձր լարման հոսանք տեղափոխելու համար կայծային մոմ: Այս լարերը ունեն մեծ խաչմերուկ և ամենախիտ մեկուսացումը բոլոր էլեկտրոնիկայի մեջ: Յուրաքանչյուր մետաղալարերի երկու կողմերում կան խցիկներ, որոնք ապահովում են մոմերի և մոդուլի շփման հանգույցի առավելագույն շփման տարածքը:
Որպեսզի լարերը էլեկտրամագնիսական միջամտություն չառաջացնեն (դրանք կխանգարեն մեքենայի այլ էլեկտրոնիկայի աշխատանքը), բարձր լարման լարերը ունեն 6-ից 15 հազար ohms դիմադրություն: Եթե լարերի մեկուսացումը նույնիսկ փոքր-ինչ ճեղքվում է, դա ազդում է շարժիչի աշխատանքի վրա (VTS-ը վատ է բռնկվում կամ շարժիչն ընդհանրապես չի միանում, և մոմերը անընդհատ լցվում են):
կայծային plug
Որպեսզի օդ-վառելիքի խառնուրդը կայուն բռնկվի, մոմերը պտտվում են շարժիչի մեջ, որոնց վրա դրվում են բռնկման մոդուլից եկող բարձր լարման լարերը: Դիզայնի առանձնահատկությունների և մոմերի շահագործման սկզբունքի մասին առանձին հոդված.
Մի խոսքով, յուրաքանչյուր մոմ ունի կենտրոնական և կողային էլեկտրոդ (կարող է լինել երկու կամ ավելի կողմնակի էլեկտրոդ): Երբ կծիկի մեջ առաջնային ոլորուն անջատված է, բարձր լարման հոսանքը երկրորդական ոլորունից հոսում է բռնկման մոդուլի միջով դեպի համապատասխան մետաղալար: Քանի որ կայծային մոմերի էլեկտրոդները կապված չեն միմյանց հետ, բայց ունեն ճշգրիտ ճշգրտված բաց, նրանց միջև ձևավորվում է խզում `էլեկտրական աղեղ, որը տաքացնում է VTS-ը մինչև բռնկման ջերմաստիճանը:

Կայծի հզորությունը ուղղակիորեն կախված է էլեկտրոդների միջև եղած բացից, ընթացիկ ուժից, էլեկտրոդների տեսակից և օդ-վառելիքի խառնուրդի բռնկման որակը կախված է մխոցում ճնշումից և այս խառնուրդի որակից (դրա հագեցվածությունից):
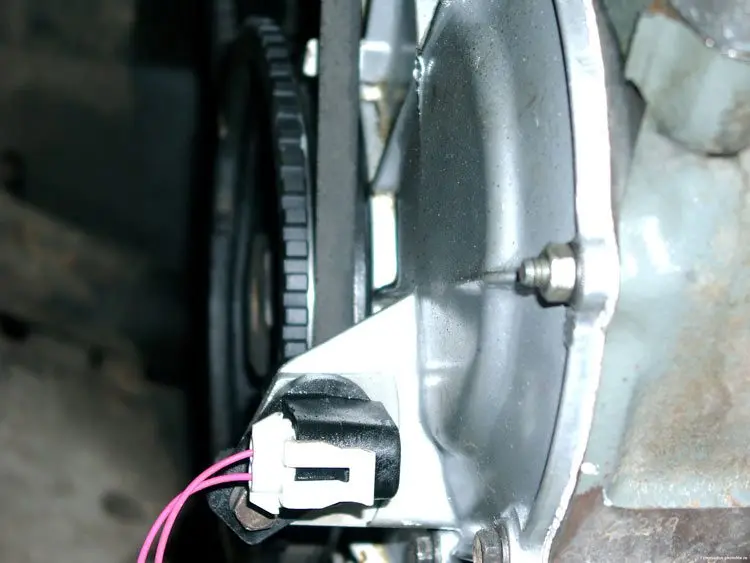
ծնկաձև լիսեռի դիրքի սենսոր (DPKV)
Էլեկտրոնային բռնկման համակարգում այս սենսորը անբաժանելի տարր է: Այն թույլ է տալիս կարգավորիչին միշտ ֆիքսել մխոցների դիրքը բալոններում (որը այդ պահին կլինի սեղմման հարվածի վերին մահացած կենտրոնում): Առանց այս սենսորից ազդանշանների, կարգավորիչը չի կարողանա որոշել, թե կոնկրետ մոմի վրա երբ կիրառել բարձր լարում: Այս դեպքում, նույնիսկ աշխատող վառելիքի մատակարարման և բոցավառման համակարգի դեպքում, շարժիչը դեռ չի գործարկվի:
Սենսորը որոշում է մխոցների դիրքը ծնկաձև լիսեռի ճախարակի վրա գտնվող օղակային հանդերձանքի շնորհիվ: Այն ունի միջինը մոտ 60 ատամ, որոնցից երկուսը բացակայում են։ Շարժիչը գործարկելու գործընթացում պտտվում է նաև ատամնավոր ճախարակը։ Երբ սենսորը (այն աշխատում է Hall սենսորի սկզբունքով) հայտնաբերում է ատամների բացակայությունը, դրա մեջ առաջանում է զարկերակ, որը գնում է դեպի կարգավորիչը։
Այս ազդանշանի հիման վրա արտադրողի կողմից ծրագրավորված ալգորիթմները գործարկվում են կառավարման ստորաբաժանումում, որոնք որոշում են UOZ-ը, վառելիքի ներարկման փուլերը, ներարկիչի աշխատանքը և բռնկման մոդուլի շահագործման ռեժիմը: Բացի այդ, այլ սարքավորումներ (օրինակ, արագաչափ) նույնպես աշխատում են այս սենսորի ազդանշանների վրա:
Էլեկտրոնային բռնկման համակարգի շահագործման սկզբունքը
Համակարգն իր աշխատանքը սկսում է այն միացնելով մարտկոցին: Դրա համար պատասխանատու է ժամանակակից մեքենաների մեծ մասում բռնկման անջատիչի շփման խումբը, և որոշ մոդելներում, որոնք հագեցած են առանց ստեղնաշարի մուտքի և էներգաբլոկի մեկնարկի կոճակով, այն ավտոմատ կերպով միանում է հենց վարորդը սեղմում է «Սկսել» կոճակը: Որոշ ժամանակակից մեքենաներում բռնկման համակարգը կարելի է կառավարել բջջային հեռախոսի միջոցով (ներքին այրման շարժիչի հեռակա մեկնարկ):
Մի քանի տարրեր պատասխանատու են SZ- ի աշխատանքի համար: Դրանցից ամենակարևորը ծնկաձեւ լիսեռի դիրքի սենսորն է, որը տեղադրված է ներարկման շարժիչների էլեկտրոնային համակարգերում: Այն մասին, թե ինչ է դա և ինչպես է այն աշխատում, կարդացեք առանձին... Այն ազդանշան է տալիս, թե որ կետում առաջին գլանի մխոցը կկատարի սեղմման հարված: Այս ազդակը գնում է կառավարման միավորին (հին մեքենաներում այս գործառույթն իրականացնում են անջատիչը և դիստրիբյուտորը), որն ակտիվացնում է համապատասխան կծիկի ոլորուն, որը պատասխանատու է բարձր լարման հոսանքի ձևավորման համար:
Շղթայի միացման պահին մարտկոցից լարումը մատակարարվում է առաջնային կարճ միացման ոլորուն: Որպեսզի կայծ ստեղծվի, անհրաժեշտ է ապահովել ծնկաձողի առանցքը Ranնկաձեւ լիսեռը չի կարող ինքնուրույն սկսել պտտվել: Սկսնակն օգտագործվում է շարժիչը գործի դնելու համար: Այս մեխանիզմի աշխատանքի մանրամասները նկարագրված են առանձին.
Սկսնակն ուժով շրջում է ծնկաձեւ լիսեռը: Դրա հետ միասին պտտահողը միշտ պտտվում է (կարդացեք այս մասի տարբեր փոփոխությունների և գործառույթների մասին) այստեղ) Ranնկաձեւ լիսեռի եզրին մի փոքր անցք է արվում (ավելի ճիշտ ՝ մի քանի ատամ չկա): Այս մասի կողքին տեղադրված է DPKV, որն աշխատում է Hall– ի սկզբունքի համաձայն: Սենսորը որոշում է այն պահը, երբ առաջին գլանի մխոցը գտնվում է վերևում ՝ մեռած կենտրոնում, եզրագծի անցքի կողմից ՝ կատարելով սեղմման հարված:
DPKV- ի կողմից ստեղծված իմպուլսները սնվում են ECU- ով: Միկրոպրոցեսորում ներդրված ալգորիթմների հիման վրա այն որոշում է յուրաքանչյուր առանձին գլանի մեջ կայծ ստեղծելու օպտիմալ պահը: Դրանից հետո կառավարման միավորը զարկերակ է ուղարկում այրիչին: Լռելյայնորեն, համակարգի այս մասը պարույրը մատակարարում է 12 վոլտ կայուն լարման: ECU- ից ազդանշան ստանալուն պես բռնկվող տրանզիստորը փակվում է:
Այս պահին կտրուկ դադարեցնում է էլեկտրաէներգիայի մատակարարումը առաջնային կարճ միացման ոլորուն: Սա հրահրում է էլեկտրամագնիսական ինդուկցիան, որի շնորհիվ երկրորդային ոլորունում առաջանում է բարձր լարման հոսանք (մինչև մի քանի տասնյակ հազար վոլտ): Կախված համակարգի տեսակից, այս ազդակը ուղարկվում է էլեկտրոնային դիստրիբյուտոր կամ անմիջապես անցնում է կծիկից դեպի կայծ:
Առաջին դեպքում SZ- ի շղթայում ներկա կլինեն բարձրավոլտ լարերը: Եթե բռնկման կծիկը տեղադրված է անմիջապես մոմի վրա, ապա ամբողջ էլեկտրական գիծը բաղկացած է սովորական լարերից, որոնք օգտագործվում են մեքենայի բեռնատար համակարգի ողջ էլեկտրական շղթայի ընթացքում:

Հենց էլեկտրականությունը մոմ է մտնում, նրա էլեկտրոդների միջև առաջանում է արտանետում, որը բռնկում է բենզինի խառնուրդը (կամ գազը ՝ օգտագործման դեպքում HBO- ն) և օդը: Այդ դեպքում շարժիչը կարող է ինքնուրույն աշխատել, իսկ այժմ մեկնարկողի կարիք չկա: Էլեկտրոնիկան (եթե օգտագործվում է մեկնարկի կոճակը) ավտոմատ կերպով անջատում է մեկնարկիչը: Ավելի պարզ սխեմաներում այս պահին վարորդը պետք է ազատի բանալին, և զսպանակով բեռնված մեխանիզմը բռնկման անջատիչի շփման խումբը կտեղափոխի համակարգի դիրքը:
Ինչպես նշվեց մի փոքր ավելի վաղ, բռնկման ժամանակը ճշգրտվում է հենց կառավարման միավորի կողմից: Կախված մեքենայի մոդելից `էլեկտրոնային շղթան կարող է ունենալ տարբեր քանակի մուտքային սենսորներ` ըստ իմպուլսների, որոնցից ECU- ն որոշում է էներգաբլոկի բեռը, ծնկաձև լիսեռի և լիսեռի պտտման արագությունը, ինչպես նաև շարժիչը Այս բոլոր ազդանշանները մշակվում են միկրոպրոցեսորի կողմից և ակտիվացվում են համապատասխան ալգորիթմները:
Էլեկտրոնային բռնկման համակարգի տեսակները
Չնայած բռնկման համակարգերի փոփոխությունների լայն բազմազանությանը, բոլորը պայմանականորեն կարելի է բաժանել երկու տեսակի.
- Ուղղակի բռնկում;
- Բաշխում դիստրիբյուտորի միջոցով:
Առաջին էլեկտրոնային SZ- ները հագեցած էին բռնկման հատուկ մոդուլով, որն աշխատում էր նույն սկզբունքով, ինչ որ անպաշտպան դիստրիբյուտորը: Նա բաշխեց բարձր լարման զարկերակը հատուկ բալոնների վրա: Հաջորդականությունը վերահսկվում էր նաև ECU- ի կողմից: Չնայած անպաշտպան համակարգի համեմատ ավելի հուսալի գործողությանը, այս փոփոխությունը դեռ բարելավման կարիք ուներ:
Նախ ՝ անորակ բարձրավոլտ լարերի վրա կարելի էր կորցնել աննշան էներգիա: Երկրորդ, էլեկտրոնային տարրերի միջոցով բարձր լարման հոսանքի անցման պատճառով պահանջվում է այդպիսի բեռի տակ աշխատելու ունակ մոդուլների օգտագործումը: Այդ պատճառներից ելնելով ՝ ավտոարտադրողները մշակել են ավելի առաջադեմ ուղղակի բռնկման համակարգ:
Այս փոփոխությունը օգտագործում է նաև բռնկման մոդուլներ, միայն դրանք աշխատում են ավելի քիչ բեռնված պայմաններում: Նման SZ- ի շղթան բաղկացած է սովորական էլեկտրալարերից, և յուրաքանչյուր մոմ ստանում է անհատական կծիկ: Այս տարբերակում կառավարման միավորը անջատում է հատուկ կարճ միացման բռնկիչի տրանզիստորը ՝ դրանով իսկ ժամանակ խնայելով բալոնների մեջ ազդակը բաշխելու համար: Չնայած այս ամբողջ գործընթացն ընթանում է մի քանի միլիվայրկյանում, նույնիսկ այս ժամանակահատվածում նույնիսկ աննշան փոփոխությունները կարող են էապես ազդել էներգաբլոկի աշխատանքի վրա:

Որպես ուղղակի բռնկմամբ SZ- ի մի տեսակ, կան փոփոխություններ երկակի պարույրներով: Այս տարբերակում 4 մխոցանի շարժիչը համակարգին միացված կլինի հետևյալ կերպ. Առաջին և չորրորդ, ինչպես նաև երկրորդ և երրորդ գլանները զուգահեռ են միմյանց: Նման սխեմայի մեջ կլինեն երկու պարույրներ, որոնցից յուրաքանչյուրը պատասխանատու է իր զույգ բալոնների համար: Երբ հսկիչ ստորաբաժանումը կտրման ազդանշանը մատակարարում է այրիչին, միաժամանակ կայծ է առաջանում զույգ բալոնների մեջ: Դրանցից մեկում արտանետումը բռնկում է օդ-վառելիքի խառնուրդը, իսկ երկրորդը պարապ է:
Էլեկտրոնային բռնկման անսարքությունները
Չնայած ժամանակակից մեքենաների մեջ էլեկտրոնիկայի ներմուծումը հնարավորություն տվեց ապահովել էներգաբլոկի և տարբեր տրանսպորտային համակարգերի ավելի ճշգրիտ կարգավորում, դա չի բացառում անսարքությունները նույնիսկ այնպիսի կայուն համակարգում, ինչպիսին բռնկումն է: Բազմաթիվ խնդիրներ որոշելու համար կօգնեն միայն համակարգչային ախտորոշումը: Էլեկտրոնային բռնկմամբ մեքենայի ստանդարտ սպասարկման համար հարկավոր չէ էլեկտրոնիկայի ոլորտում դիպլոմային դասընթացներ անցնել, բայց համակարգի անբարենպաստությունն այն է, որ տեսողականորեն գնահատեք դրա վիճակը միայն մոմի մուրով և լարերի որակով:
Բացի այդ, միկրոպրոցեսորների վրա հիմնված SZ- ն զերծ չէ որոշ խափանումներից, որոնք բնորոշ են նախորդ համակարգերին: Այս սխալների շարքում.
- Մոմերը դադարում են աշխատել: Առանձին հոդվածից դուք կարող եք պարզել, թե ինչպես կարելի է որոշել դրանց սպասարկելիությունը.
- Ոլորունի ոլորման կոտրվածք;
- Եթե համակարգում օգտագործվում են բարձրավոլտ մետաղալարեր, ապա ծերության կամ մեկուսացման վատ որակի պատճառով դրանք կարող են ճեղքվել, ինչը հանգեցնում է էներգիայի կորստի: Այս դեպքում կայծն այնքան էլ հզոր չէ (որոշ դեպքերում ընդհանրապես բացակայում է) բենզինի գոլորշիները բռնկելու համար `խառնված օդի հետ;
- Կոնտակտների օքսիդացում, որը հաճախ տեղի է ունենում այն մեքենաներում, որոնք շահագործվում են խոնավ շրջաններում:

Բացի այս ստանդարտ խափանումներից, ESP- ն կարող է նաև դադարեցնել աշխատանքը կամ անսարքությունը `մեկ սենսորի անսարքության պատճառով: Երբեմն խնդիրը կարող է ընկած լինել հենց էլեկտրոնային կառավարման միավորի մեջ:
Ահա հիմնական պատճառները, թե ինչու բռնկման համակարգը կարող է ճիշտ չաշխատել կամ ընդհանրապես չգործել.
- Մեքենայի սեփականատերը անտեսում է մեքենայի սովորական սպասարկումը (ընթացակարգի ընթացքում սպասարկման կայանը ախտորոշում և մաքրում է սխալներ, որոնք կարող են առաջացնել էլեկտրոնիկայի որոշ խափանումներ);
- Վերանորոգման գործընթացում տեղադրվում են անորակ մասեր և մղիչներ, իսկ որոշ դեպքերում գումար խնայելու համար վարորդը գնում է պահեստամասեր, որոնք չեն համապատասխանում համակարգի որոշակի փոփոխություններին:
- Արտաքին գործոնների ազդեցությունը, օրինակ `տրանսպորտային միջոցի շահագործումը կամ պահպանումը բարձր խոնավության պայմաններում:
Բոցավառման հետ կապված խնդիրները կարող են մատնանշվել այնպիսի գործոններով, ինչպիսիք են.
- Բենզինի սպառման ավելացում;
- Շարժիչի վատ արձագանքը գազի ոտնակը սեղմելուն: Անպատշաճ UOZ- ի դեպքում, արագացուցիչի ոտնակը սեղմելը կարող է, ընդհակառակը, իջեցնել մեքենայի դինամիկան:
- Էներգաբլոկի աշխատանքը նվազել է.
- Շարժիչի անկայուն արագությունը կամ այն սովորաբար կանգ է առնում անգործության մեջ.
- Շարժիչը սկսեց վատ աշխատել:
Իհարկե, այս ախտանիշները կարող են ցույց տալ այլ համակարգերի խափանումները, օրինակ `վառելիքի համակարգը: Եթե կա շարժիչի դինամիկայի նվազում, դրա անկայունություն, ապա պետք է նայեք էլեկտրալարերի վիճակին: Բարձրավոլտ լարերի օգտագործման դեպքում դրանք կարող են ծակվել, ինչի պատճառով կայծի հզորության կորուստ կլինի: Եթե DPKV- ն փչանա, շարժիչը ընդհանրապես չի գործի:

Միավորության շատակերության աճը կարող է կապված լինել մոմերի սխալ շահագործման, դրա մեջ առկա սխալների պատճառով ECU- ի արտակարգ ռեժիմի անցնելու կամ մուտքային սենսորի խզման հետ: Ավտոմեքենաների բորտային համակարգերի որոշ փոփոխություններ հագեցած են ինքնորոշման տարբերակով, որի ընթացքում վարորդը կարող է ինքնուրույն որոշել սխալի կոդը, ապա կատարել համապատասխան վերանորոգման աշխատանքներ:
Էլեկտրոնային բոցավառման տեղադրում մեքենայի վրա
Եթե մեքենան օգտագործում է կոնտակտային բռնկում, ապա այս համակարգը կարող է փոխարինվել էլեկտրոնային բոցավառմամբ: Ճիշտ է, դրա համար անհրաժեշտ է ձեռք բերել լրացուցիչ տարրեր, առանց որոնց համակարգը չի աշխատի: Մտածեք, թե ինչ է անհրաժեշտ դրա համար և ինչպես է կատարվում աշխատանքը։
Պահեստամասերի պատրաստում
Բոցավառման համակարգը թարմացնելու համար ձեզ հարկավոր է.
- Անկոնտակտ տիպի դիստրիբյուտոր: Այն նաև կբաշխի բարձր լարման հոսանքը լարերի միջոցով յուրաքանչյուր մոմի վրա: Յուրաքանչյուր մեքենա ունի դիստրիբյուտորների իր մոդելները:
- Անջատիչ. Սա էլեկտրոնային ընդհատիչ է, որը կոնտակտային բոցավառման համակարգում ունի մեխանիկական տեսակ (լիսեռի վրա պտտվող սահող, բացում / փակում է բոցավառման կծիկի առաջնային ոլորման կոնտակտները): Անջատիչը արձագանքում է ծնկաձև լիսեռի դիրքի ցուցիչի իմպուլսներին և փակում / բացում է բռնկման կծիկի կոնտակտները (դրա առաջնային ոլորուն):
- Բոցավառման կծիկ. Սկզբունքորեն, սա նույն պարույրն է, որն օգտագործվում է շփման բռնկման համակարգում: Որպեսզի մոմը կարողանա ճեղքել օդը էլեկտրոդների միջև, անհրաժեշտ է բարձր լարման հոսանք: Այն ձևավորվում է երկրորդական ոլորման մեջ, երբ առաջնայինն անջատված է:
- Բարձր լարման լարեր. Ավելի լավ է օգտագործել նոր լարերը, և ոչ թե նրանք, որոնք տեղադրվել էին նախորդ բոցավառման համակարգի վրա:
- Մոմերի նոր հավաքածու.
Բացի թվարկված հիմնական բաղադրիչներից, ձեզ հարկավոր է ձեռք բերել հատուկ ծնկաձև լիսեռի ճախարակ՝ օղակաձև հանդերձով, ծնկաձև լիսեռի դիրքի սենսորային ամրակով և հենց սենսորով:
Տեղադրման աշխատանքների իրականացման կարգը
Կափարիչը հանվում է դիստրիբյուտորից (դրան միացված են բարձր լարման լարերը): Ինքնին լարերը կարող են հեռացվել: Մեկնարկի օգնությամբ ծնկաձև լիսեռը մի փոքր պտտվում է, մինչև ռեզիստորը և շարժիչը ուղիղ անկյուն կազմեն։ Ռեզիստորի դիրքի անկյունը սահմանելուց հետո ծնկաձև լիսեռը չի կարող պտտվել:
Բոցավառման պահը ճիշտ սահմանելու համար հարկավոր է կենտրոնանալ դրա վրա տպված հինգ նշանների վրա: Նոր դիստրիբյուտորը պետք է տեղադրվի այնպես, որ դրա միջին նշանը համընկնի հին դիստրիբյուտորի միջին նշանի հետ (դրա համար, նախքան հին դիստրիբյուտորը հեռացնելը, շարժիչի վրա պետք է համապատասխան նշան կիրառվի):

Բոցավառման կծիկին միացված լարերը անջատված են: Հաջորդը, հին դիստրիբյուտորը հանվում և ապամոնտաժվում է: Նոր դիստրիբյուտորը տեղադրվում է շարժիչի վրա տեղադրված պիտակի համաձայն:
Դիստրիբյուտորը տեղադրելուց հետո մենք անցնում ենք բոցավառման կծիկի փոխարինմանը (կոնտակտային և ոչ կոնտակտային բոցավառման համակարգերի տարրերը տարբեր են): Կծիկը միացված է նոր դիստրիբյուտորին, օգտագործելով կենտրոնական երեք փին մետաղալար:
Դրանից հետո շարժիչի խցիկի ազատ տարածքում տեղադրվում է անջատիչ: Դուք կարող եք այն ամրացնել մեքենայի թափքի վրա ինքնակպչուն պտուտակներով կամ պտուտակներով: Դրանից հետո անջատիչը միացված է բռնկման համակարգին:
Դրանից հետո ծնկաձև լիսեռի դիրքի սենսորի համար անցումով տեղադրվում է ատամնավոր ճախարակ: Այս ատամների մոտ տեղադրվում է DPKV (դրա համար օգտագործվում է հատուկ բրա, որը ամրացված է բալոնի բլոկի պատյանին), որը միացված է անջատիչին: Կարևոր է, որ ատամի բացթողումը համընկնի սեղմման հարվածի առաջին մխոցի մխոցի վերին մեռած կետի հետ:
Էլեկտրոնային բռնկման համակարգերի առավելությունները
Չնայած միկրոպրոցեսորային բռնկման համակարգի նորոգումը ավտովարորդին կարժենա բավականին կոպեկ, և անսարքությունների ախտորոշումը լրացուցիչ ծախսեր են `համեմատած կոնտակտային և անկապ SZ- ի հետ, այն գործում է ավելի կայուն և հուսալի: Դա նրա հիմնական առավելությունն է:
Ահա ESP- ի եւս մի քանի առավելություն.
- Որոշ փոփոխություններ կարող են տեղադրվել նույնիսկ կարբյուրատորի էներգաբլոկների վրա, ինչը հնարավորություն է տալիս դրանք օգտագործել ներքին մեքենաների վրա.
- Կոնտակտային դիստրիբյուտորի և անջատիչի բացակայության պատճառով հնարավոր է դառնում երկրորդական լարման բարձրացումը մինչև մեկուկես անգամ: Դրան շնորհիվ կայծերը ստեղծում են «ճարպային» կայծ, իսկ HTS- ի բռնկումն ավելի կայուն է.
- Բարձր լարման զարկերակի ձեւավորման պահը որոշվում է ավելի ճշգրիտ, և այս գործընթացը կայուն է ներքին այրման շարժիչի տարբեր աշխատանքային ռեժիմներում.
- Բոցավառման համակարգի աշխատանքային ռեսուրսը հասնում է մեքենայի վազքի 150 հազար կիլոմետր հեռավորության վրա, իսկ որոշ դեպքերում `նույնիսկ ավելին:
- Շարժիչն աշխատում է ավելի կայուն ՝ անկախ սեզոնից և աշխատանքային պայմաններից:
- Պետք չէ շատ ժամանակ ծախսել պրոֆիլակտիկայի և ախտորոշման համար, և շատ մեքենաների ճշգրտումը կատարվում է ճիշտ ծրագրակազմը տեղադրելով:
- Էլեկտրոնիկայի առկայությունը թույլ է տալիս փոխել էներգաբլոկի պարամետրերը `առանց դրա տեխնիկական մասի միջամտության: Օրինակ, որոշ ավտովարորդներ իրականացնում են չիպի կարգաբերման կարգ: Այն մասին, թե ինչ հատկությունների վրա է ազդում այս ընթացակարգը և ինչպես է այն իրականացվում, կարդացեք մեկ այլ ակնարկում... Մի խոսքով, սա այլ ծրագրերի տեղադրում է, որոնք ազդում են ոչ միայն բռնկման համակարգի, այլ նաև վառելիքի ներարկման ժամանակի և որակի վրա: Րագիրը կարելի է անվճար ներբեռնել ինտերնետից, բայց այս դեպքում պետք է լիովին համոզված լինեք, որ ծրագրակազմը որակյալ է և իսկապես համապատասխանում է որոշակի մեքենայի:
Չնայած էլեկտրոնային բռնկումը պահպանման և վերականգնման համար ավելի թանկ է, և աշխատանքների մեծ մասը պետք է կատարվի մասնագետի կողմից, այդ թերությունը փոխհատուցվում է ավելի կայուն աշխատանքի և մեր կողմից դիտարկված այլ առավելությունների միջոցով:
Այս տեսանյութը ցույց է տալիս, թե ինչպես ինքնուրույն տեղադրել ESP- ը դասականների վրա.

Տեսանյութ թեմայի վերաբերյալ
Ահա մի կարճ տեսանյութ, թե ինչպիսին է կոնտակտային բոցավառման համակարգից էլեկտրոնայինին անցնելու գործընթացը.

Հարցեր եւ պատասխաններ:
Որտեղ է օգտագործվում էլեկտրոնային բռնկման համակարգը: Բոլոր ժամանակակից մեքենաները, անկախ դասից, հագեցած են նման բոցավառման համակարգով։ Դրանում բոլոր իմպուլսներն առաջանում և բաշխվում են բացառապես էլեկտրոնիկայի շնորհիվ։
Ինչպե՞ս է աշխատում էլեկտրոնային բռնկումը: DPKV-ն սեղմման հարվածի վրա ֆիքսում է 1-ին մխոցի TDC պահը, իմպուլս է ուղարկում ECU: Անջատիչը ազդանշան է ուղարկում բռնկման կծիկին (ընդհանուր և այնուհետև բարձր լարման հոսանքը կայծային մոմին կամ անհատին):
Ի՞նչ է ներառված էլեկտրոնային բոցավառման համակարգում: Այն միացված է մարտկոցին և ունի՝ բռնկման անջատիչ, կծիկ/վրկ, կայծային մոմեր, էլեկտրոնային կառավարման միավոր (կատարում է անջատիչի և դիստրիբյուտորի ֆունկցիա), մուտքային սենսորներ։
Որո՞նք են անկոնտակտ բոցավառման համակարգի առավելությունները: Ավելի հզոր և կայուն կայծ (անջատիչի կամ դիստրիբյուտորի կոնտակտներում էլեկտրաէներգիայի կորուստ չկա): Դրա շնորհիվ վառելիքը արդյունավետորեն այրվում է, իսկ արտանետումները ավելի մաքուր են:


2 комментария
Մերվին
Խնդրում եմ, հնարավո՞ր եք, որ ես կարողանայի ինչ-որ տեղեկատվություն ստանալ
Աբդուլ Բասիտ Ալ Նաբհանի
Աստված օրհնի ձեզ և թող Աստված ձեզ լավ հատուցի